I’m working on a new build using a 4-in-1 ESC with BLHeli_32 and BD-shot.
I did my initial setup with the “initial setup tool” in Mission Planner. That produced really good results.
Today I set up the RPM based harmonic notch filter.
Following my understanding of what is outlined in the WIKI I enabled ESC telemetry, set the parameter for collecting raw IMU data and did a test flight.
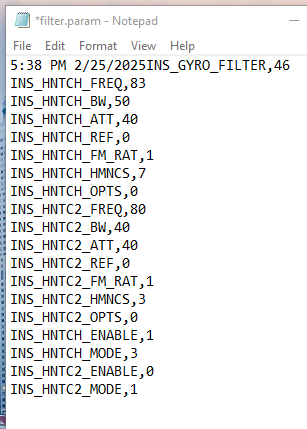
I set the peak of the first hump of the curve and approximated the bandwidth and had the utility calculate my notch filter values. I set the frequency to 83 and bandwidth to 50. I then did the re-calculate function, and saved the new parameters - and loaded them onto the copter.
The problem was that once airborne, the copter made a vibration sound - like something was out of balance on the props or motors. I landed to check the copter and found nothing. I did a power reset and tried again - same problem - only this time I had a little bit of stability issue and landed off kilter.
Here are the logs from those two files:
Then I disabled the harmonic notch filter and did one more test flight. No problems - flight was normal.
I’m guess I did something wrong with setting the notch filter parameters - but I was quite surprised that the error caused such a vibration and stability problem.
If someone could please look over my shoulder and help me find my mistake - I’d greatly appreciate it.
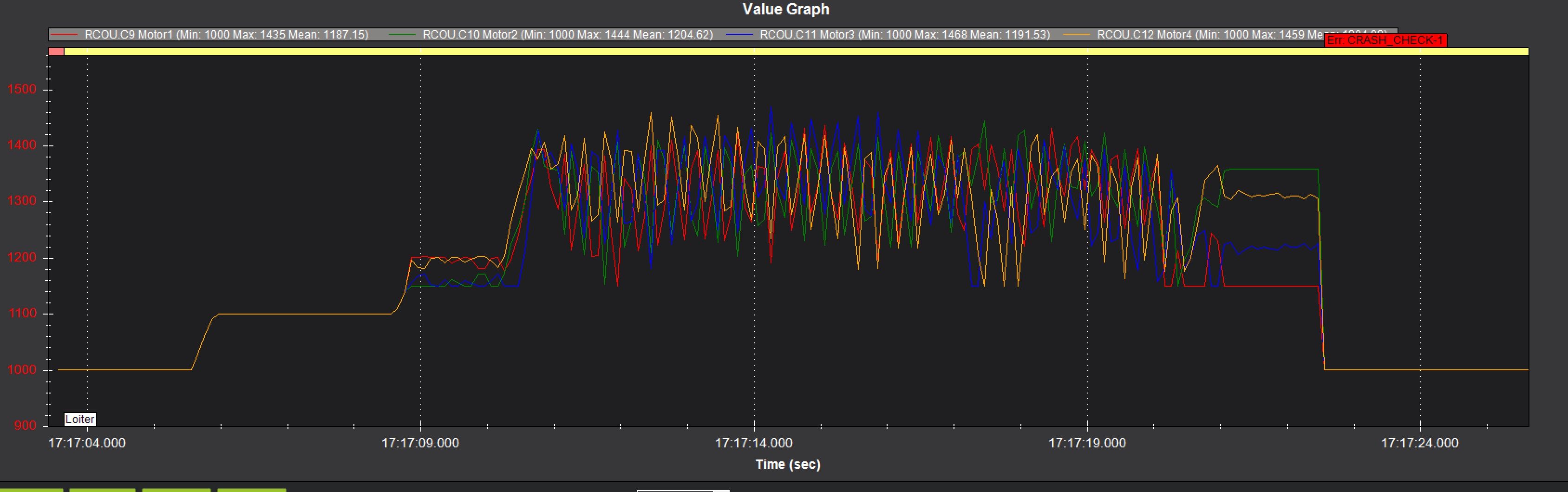
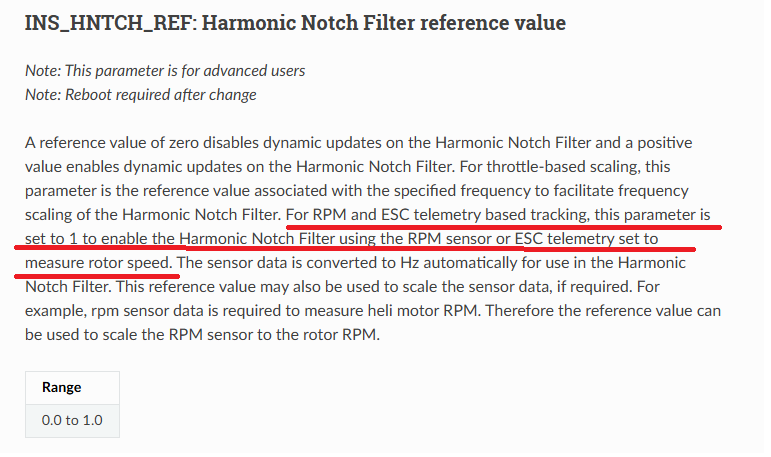
If this is the same craft you posted about a couple days ago it still has outputs oscillation on default Rate PID’s. And the Notch filter is doing nothing as you have the reference at 0. Or maybe it’s doing something but nothing good…
Here is the evidence which you can easily reproduce to do some basic tuning before configuring the notch filter.
I’ve set up ESC/RPM notch filters before - and used the IMU Filter Review Tool - but for some reason I don’t recall this parameter - and didn’t have this problem.
And I don’t remember seeing a reference to it in the WIKI about setting up BD-Dshot telemetry and RPM Notch Filters. I’ll have to go back and check. All the documentation that leads to using this feature is spread across several entries - I may write a new technical article about how to do this so I can refer to it next time.
I haven’t done anything with the PIDs yet - I’m following the process of setting up a notch filter and then doing an auto tune. No doubt the default PIDS are off a bit - but from the charts and the behavior - they’re pretty good. I think you were one of the people who developed the Mission Planner initial tuning tool - if so - you did a great job.
Regarding the Methodic Configuartor, I haven’t used it yet. Looking over the GitHub readme, it looks fairly involved in getting it set up and learning how to use it. But I expect it’s easy once its been done a time or two. If I use it after my initial setup, it will be a good test to it’s benefits.
I wonder if there’s any thought at incorporating the Methodic Configurator into Mission Planner.
That was Shawn @xfacta who came up with the Initial Tool as an Excel sheet and then later incorporated into Mission Planner. Indeed, he did a great job.
Just a comment about setting the notch filter before some basic Rate PID tuning. You really want to lower the output oscillation if present before configuring the Notch filter. There is no reason not to do this. It’s usually simply done by lowering the rate PID’s and properly setting the INS_ACCELZ_P/I parameters based on hover thrust.
a different menu for each task, some tasks have no menu, so you need to dig into the 1200 parameters
each task only presents you a relevant subset of parameters
parameter documentation
Yes, only on the full-parameter tree view
Yes
displays relevant documentation
No
Yes
makes sure you do not forget a step
No
Yes
checks that parameters get correctly uploaded
No
Yes
reuse params in other vehicles
No, unless you hand edit files
Yes, out-of-the-box
documents why you changed each parameter
No
Yes
tutorials and learning resources
No, scattered and not integrated
Yes, context-aware help integrated
auto. install lua scripts on the FC
No
Yes
auto. backup of parameters before changing them
No
Yes
No, there are no plans to integrate it in MP. These are very different tools with very different goals. AMC is not a ground control station and never will be. It does integrate an improved version of @xfacta initial parameter and it integrates the IMU temperature software.
I’m sure once I finally invest the time into getting it installed and learning how to use it, it will be really useful.
My point is that reading the GitHub readme seems like there will be some significant effort getting it up and going.
Have you considered making some videos?
For those of us who don’t use ArduPilot as a part of our daily work, it’s daunting enough to sort through the WIKI and forums to get oriented. In fact, when I do a search to get information on how to do something I did some months ago but need to refresh my memory, I frequently am directed to forum posts of my own and the helpful responses - because the WIKI still doesn’t have the information.
So taking on a new application is no small thing - regardless of the benefits. Especially since the “old fashioned” way still works fairly well.
Sadly, many things that are really “better ideas” sometime are adopted slowly because of unfamiliarity and inertia. As soon as I muster up the time and energy to use the new tool, I’ll do my best to help others.