@Holybro
i am using Holybro 6x on Octoquad/x configuration with hard mounded.
i see there is no vibration reduced after configured the notch filter. mechanically i have checked frame and propeller balance and motor tilt everything looks fine to me.
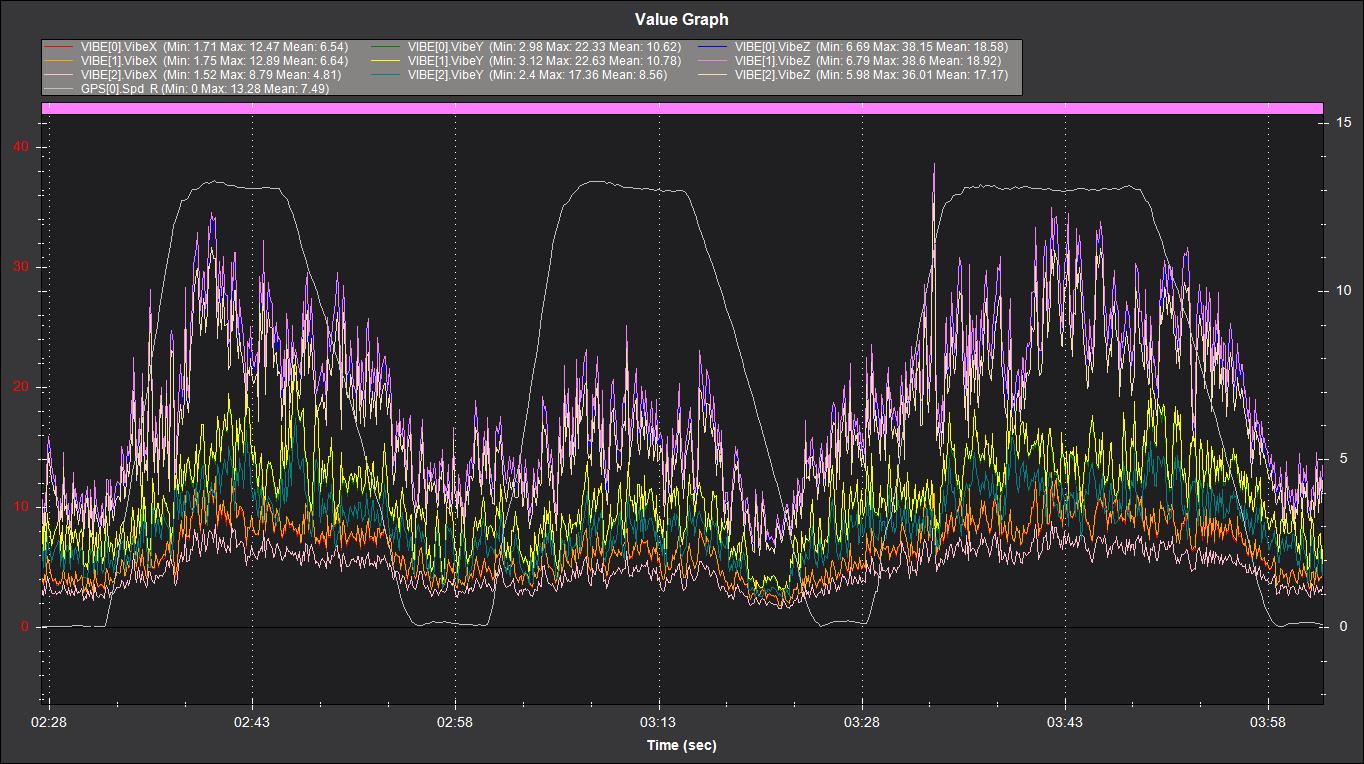
Z axis on all IMUs has more(ranges 30-50 m/s/s/s) vibe when its flying towards the head wind at 20m/s .
how can we reduce the the getting vibe high on toward the head wind, because when see the log while hovering or flying in slow speed like up to 7-9m/s it does not have the problem.
i have an doubt that since we configure the notch filter at hover state. how does it help the filt controller when moving very fast towards the wind?
Physical Z axis vibrations are higher than ideal and may give you trouble one day.
X and Y axis is OK.
You likely have a frame flexibility problem, or wiring and things are moving around when they should be secured. Nothing should be touching the flight controller.
As @amilcarlucas says you probably also need to do more with the thrust expo and MOT_SPIN_MIN and MOT_THST_EXPO.
If you have T-Motor Alpha ESCs I would set MOT_THST_EXPO,0.6 then retest MOT_PWM_ARM and MOT_PWM_MIN.
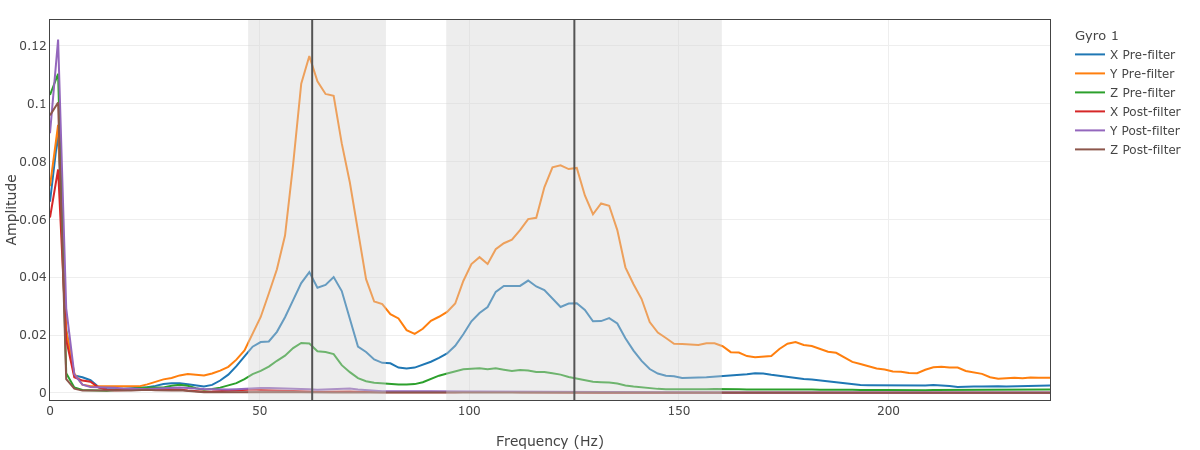
It looks like you filter configuration is working well:
The harmonic notch filter is appropriate to use for nearly all levels of vibrations, unless your pre-filter graph showed a nearly flat line like the post-filter lines in the graph above. That graph is from your log.
But none of that changes the physical vibrations (pre-filter), which can still confuse the accelerometers, leading to poor tuning and attitude control, and even a fly-away.
Less than 15m/s/s is unlikely to cause problems, and less than 10/m/s/s is good.
Around 20m/s/s or more can easily seen to be causing issues in peoples logs, or at least making the copter more difficult to tune, always arriving at a bad result.