I ve got the latest beta firmware on my quad its flying o/k except when I give a full throttle it leans to the left but then levels off ive done a recallibration of level and done an esc calibration any ideas gents
If you give full thr fc cant stabilize it, try not to pass 70% Marty.
1 Like
thank you never thought of that you are a super hero
1 Like
Ideally hover at 50%
Hi Ale sometimes I get carried away and just love doing a bit of acro I no I should not but its fun
1 Like
The system should have enough headroom for full throttle.
Full transmitter stick up does not equal full output to the motors. And you can tune this behavior. I am not somewhere I can look things up at the moment, but I believe it is the atc_mix_man parameter. (but I could be completely wrong about that… sorry) And there’s another similar parameter having to do w/ Yaw, and I don’t remember the name of it at all… But look through the full parameter list online and you’ll find which to adjust.
I fly full throttle flights every day :).
I do have an issue w/ some of my copters leaning. If I fly at high speeds, the vibrations cause the system to lean more and more to one side (always seems to be the left for me, on several copters). I can land, re-level the copter and it’s OK for a while. But then after I reboot, it will be pulling to the right until I do a high speed run to cause the problem I am already correcting, and then it is level again. On these copters w/out ideal vibrations, I basically make a compromise so it leans a little to the right when I take off, and if I do a lot of full throttle runs, it’s leaning a bit to the left by the time I land.
Not sure if that matches the symptoms you’re seeing… My vibrations are quite low in the logs, but this is on tiny copters, and the FC reacts differently to the frequency of vibrations on the little microcopters I’ve been using lately.
Edit to say, parameters are:
ATC_THR_MIX_MAN (assuming you’re in stabilize or acro)
and
MOT_YAW_HEADROOM
3 Likes
I agree with @wicked1 that it’s probably not a control issue (it’s impossible to be sure without an onboard log though). I’m pretty sure that the controllers will always prioritise attitude over altitude. So even if the pilot commands full throttle, if the vehicle starts losing attitude control, the overall average output to the motors will be reduced in order to give more room for the attitude controllers to operate.
I also agree that the most likely culprit is actually high vibration leading to an attitude estimation problem.
2 Likes
thank you Wicked ! and Randy,will look at those parameters later today and also will do an autotune and will report back yes it was in stabilization
Hi Wicked 1 have checked both those parameters they are both on 0.1 should I increase them to about 0.4/0.5 need to alter indoors no way to do it at field many thanks
My mix_man is at .4.
Yaw Headroom is at 200. (I think this is the default value.)
1 Like
thank you my friend will try these latter on
I think most likely the issue is vibrations, though, so I’m not sure if changing those will help.
I did experiment with changing the bias learning for Accel and gyro. My biases for each were growing off the charts over the course of a flight. I think I convinced myself it made a difference, but it might be placebo. The leaning issue isn’t consistent, so it’s hard to know for sure.
ek2_abias_p_nse
ek2_gbias_p_nse
I added a zero to each, to make it adjust bias more slowly.
1 Like
ile try the 1st 2 then maybe try them will also do a autotune again,thank you so much
Marty,
Any luck figuring out this problem?
I just finished a copter w/ the lowest vibes ever out of any of mine, and it has this leaning issue VERY badly. The vibes are between 2 and 5 in the logs. I have other copters where the vibes are in the 30’s and they don’t lean this badly.
When I replied to this thread a couple weeks ago I was confident the issue was vibrations… I had recently finished a copter that had the leaning issue and vibrations that spiked to the 50’s. By the time I got the vibrations down to 15 average and spiking to 30 max, the leaning issue was manageable. But now this copter with vibes around 2 and peaking to 5, it leans worse than I’ve ever experienced… After flying for a couple minutes it’s so bad I can’t even compensate anymore… Full stick right, and it’s still going left.
SO… I’m back to thinking maybe vibes are not the issue…
This has been the single most frustrating issue in the 3 or so years I’ve been messing w/ these microcopters.
I’ve thought maybe electrical interference, maybe vibrations, maybe flaws in individual flight controllers. I’ve started four or five threads on the topic posting lots of logs, and no one ever finds an issue. I usually get it solved (at least to where it is manageable), but am never sure exactly why. In one case, a new FC seemed to fix it. In another, adding capacitors seemed to fix it. In another, lowering vibrations seems to have fixed it. Urg, I don’t get it.
In all cases, even though I’m in stabilize, having GPS lock, “EKF using GPS” message appears, and the leaning mostly goes away. So even in a non GPS mode, the GPS fixes it. The problem is, for these microcopters, I don’t always have GPS signal and usually don’t need it for anything.
Sorry, that turned in to a bit of a rant…
But, I am curious if you made any progress w/ yours.
1 Like
Can you post another log?
1 Like
Hi,ive done lots of testing,was out on Saturday weather was terrible,quad flew the worst ever,regarding the tilt ive tried numerous setting’s and found around 0.7 max to be the best gives A none violent tilt to about 15 degrees left and settles down very fast,I struggle to upload logs on here sorry but stil love my beastie
Marty, what parameter are you talking about, that you put to 0.7?
Andy, Yes… I have a log from yesterdays flights that I guess I will upload in a few minutes. It’s not ideal to see the problem. I mean, the problem was happening, but I was kind of flying in circles. And yawing around 180 degrees resets the tilt for a second. Ideally I’d take a long straight flight and let the problem build up… I will try to do that sometime, but have a busy couple days with work now.
I’ll be right back w/ a log…
OK, I took a quick flight.
Flew for a couple minutes w/out GPS, and it’s tilting badly. Then land and wait for GPS. Then it’s fine the rest of the flight.
Thank you for looking at it.
I think this is the same problem we identified last time - your accels should be centered around 0 (or -10 for Z) but your X axis has a -1m/s/s bias after some flying around:
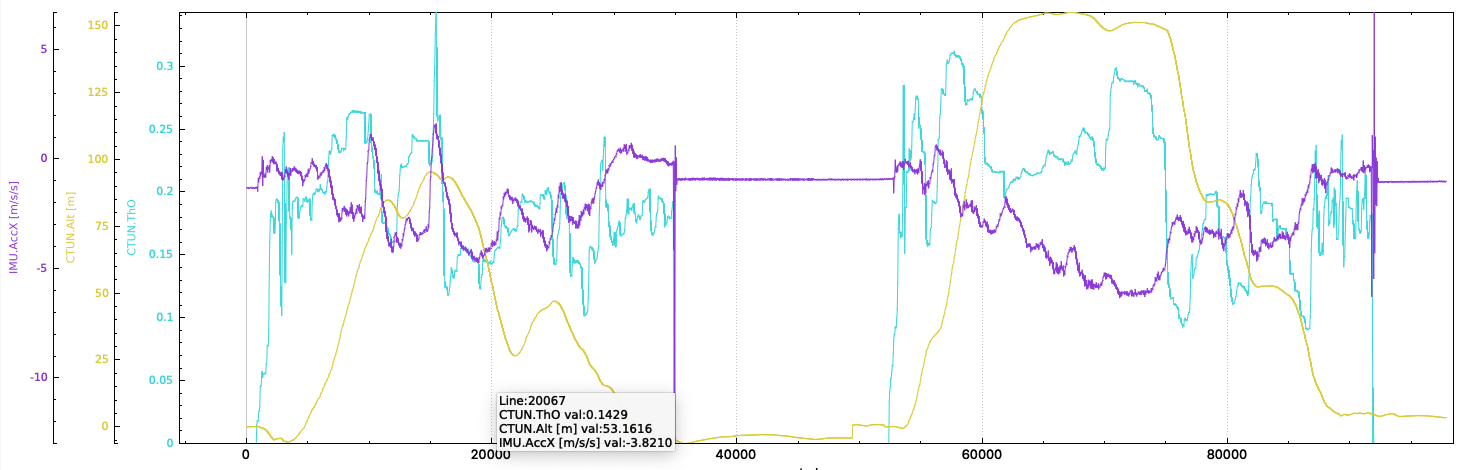
I’m not sure whether this is a sensor or EKF problem. My guess is a sensor problem as the recorded values should be largely unfiltered.
Yes, the Nkf1.gx is large but it kind of stabilizes to a high value. Is there something that makes large temperature differences around the gyro? EKF variance during the last part of the flight. Is this a new kakute mini?