Hi everybody! I’m trying to get a newly built quadcopter to work, but there is a strange problem I just don’t understand how to fix! So, it seems to fly just find in manual modes like stabilize, but when I change to loiter or Alt hold, the motors just cut off and the copter drops to the ground
Should the DAlt (desired altitude) really be at 0 when flying in manual modes? If not, what can the problem be here? The spikes are when I change into loiter mode and then instantly having to go back into stabilize mode to prevent a crash.
This is where it seems like everything fails Alt (inertial nav alt estimate) seems to go all over the place for some reason, not at all with any relation to BarAlt (which it should, according to the APM AltHold wiki). Does this mean that my ublox NEO-6M GPS is defective? Or what could be the cause of this? I will include the log file and a picture showing all 3 items in relation to each other.
I appreciate every answer and any idea! Thank you very much!
it looks there is a discrepancy between BarAlt and Alt which triggered EKF_CHECK alarms btw due to inconsistency.
unless you fly below the see level, it looks to me that the barometer is more accurate, so probably the GPS is faulty.
Please do the following and post the logs :
1 - hover in stabilize mode and maintain position and altitude within 1m radius for 1min
2- try to takeoff in Loiter/AltHold mode.
[quote=“kafteji”]it looks there is a discrepancy between BarAlt and Alt which triggered EKF_CHECK alarms btw due to inconsistency.
unless you fly below the see level, it looks to me that the barometer is more accurate, so probably the GPS is faulty.
Please do the following and post the logs :
1 - hover in stabilize mode and maintain position and altitude within 1m radius for 1min
2- try to takeoff in Loiter/AltHold mode.
and post logs[/quote]
Thank you very much for your answer kafteji! I’m certain that my NEO-6M module is defective, as the small shielding on the ublox module broke after a crash of a previous quad. I did some very fine soldering and got the shield to go back in place and it looks great, but I guess a small blob of solder maybe formed inside. The APM is a new board from ReadyToFlyQuads, and as you said, the barometer seems just okay!
I wont actually try to take off in loiter as I don’t want to risk my quad, I’m pretty sure there might be a crash. But thanks a lot for the instructions! I’m just very certain that it is the GPS and will therefore primarily test a new one.
The GPS module I ordered was THIS ONE. It’s shipped with registered HongKong Post (for free!) so it should turn up in a week. HongKong Post is very fast to deliver to Sweden.
I will give an update when I have received this GPS module, so that other people with the same issue can identify their problem easier
 I’m trying to get a newly built quadcopter to work, but there is a strange problem I just don’t understand how to fix! So, it seems to fly just find in manual modes like stabilize, but when I change to loiter or Alt hold, the motors just cut off and the copter drops to the ground
I’m trying to get a newly built quadcopter to work, but there is a strange problem I just don’t understand how to fix! So, it seems to fly just find in manual modes like stabilize, but when I change to loiter or Alt hold, the motors just cut off and the copter drops to the ground 
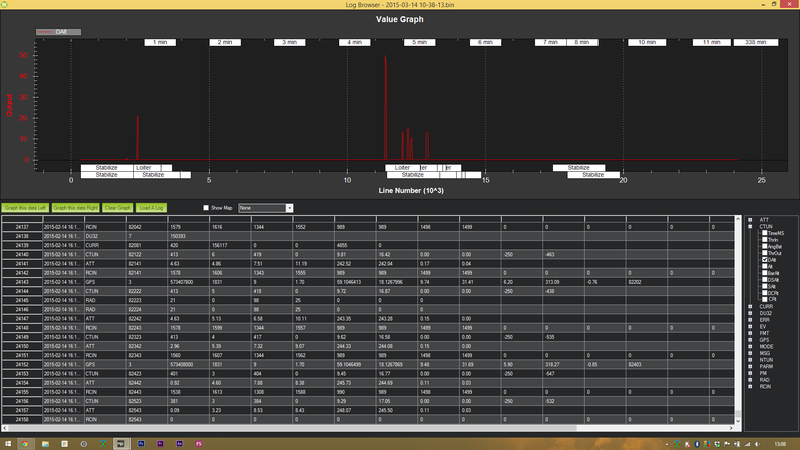
 If not, what can the problem be here? The spikes are when I change into loiter mode and then instantly having to go back into stabilize mode to prevent a crash.
If not, what can the problem be here? The spikes are when I change into loiter mode and then instantly having to go back into stabilize mode to prevent a crash.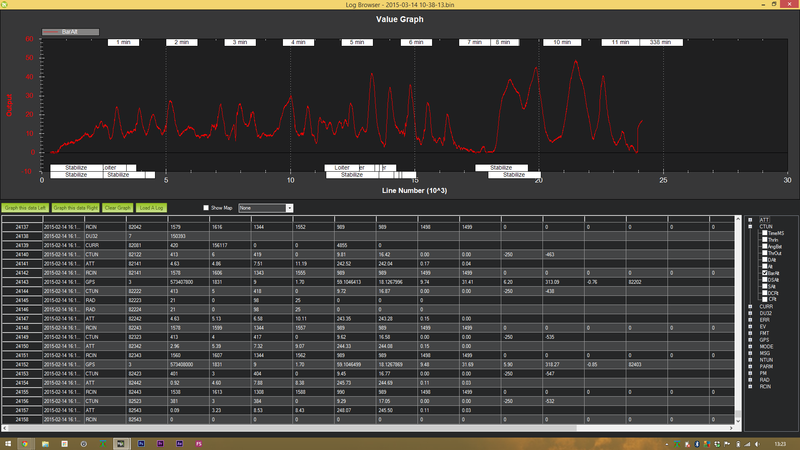

 Alt (inertial nav alt estimate) seems to go all over the place for some reason, not at all with any relation to BarAlt (which it should, according to the APM AltHold wiki). Does this mean that my ublox NEO-6M GPS is defective? Or what could be the cause of this? I will include the log file and a picture showing all 3 items in relation to each other.
Alt (inertial nav alt estimate) seems to go all over the place for some reason, not at all with any relation to BarAlt (which it should, according to the APM AltHold wiki). Does this mean that my ublox NEO-6M GPS is defective? Or what could be the cause of this? I will include the log file and a picture showing all 3 items in relation to each other. I’m certain that my NEO-6M module is defective, as the small shielding on the ublox module broke after a crash of a previous quad. I did some very fine soldering and got the shield to go back in place and it looks great, but I guess a small blob of solder maybe formed inside. The APM is a new board from ReadyToFlyQuads, and as you said, the barometer seems just okay!
I’m certain that my NEO-6M module is defective, as the small shielding on the ublox module broke after a crash of a previous quad. I did some very fine soldering and got the shield to go back in place and it looks great, but I guess a small blob of solder maybe formed inside. The APM is a new board from ReadyToFlyQuads, and as you said, the barometer seems just okay!
{kind=link}
{kind=link}
{kind=link}