I’ve been getting some very peculiar and erroneous behaviors with Auto-Tune on Copter 4.3.
Some times one of PIDs axis are inconsistent.
Some times a couple of parameters for an axis don’t get stored. (observed by comparing the MavLink message report or the Auto-Tune PIDs with what actually got stored in the parameters)
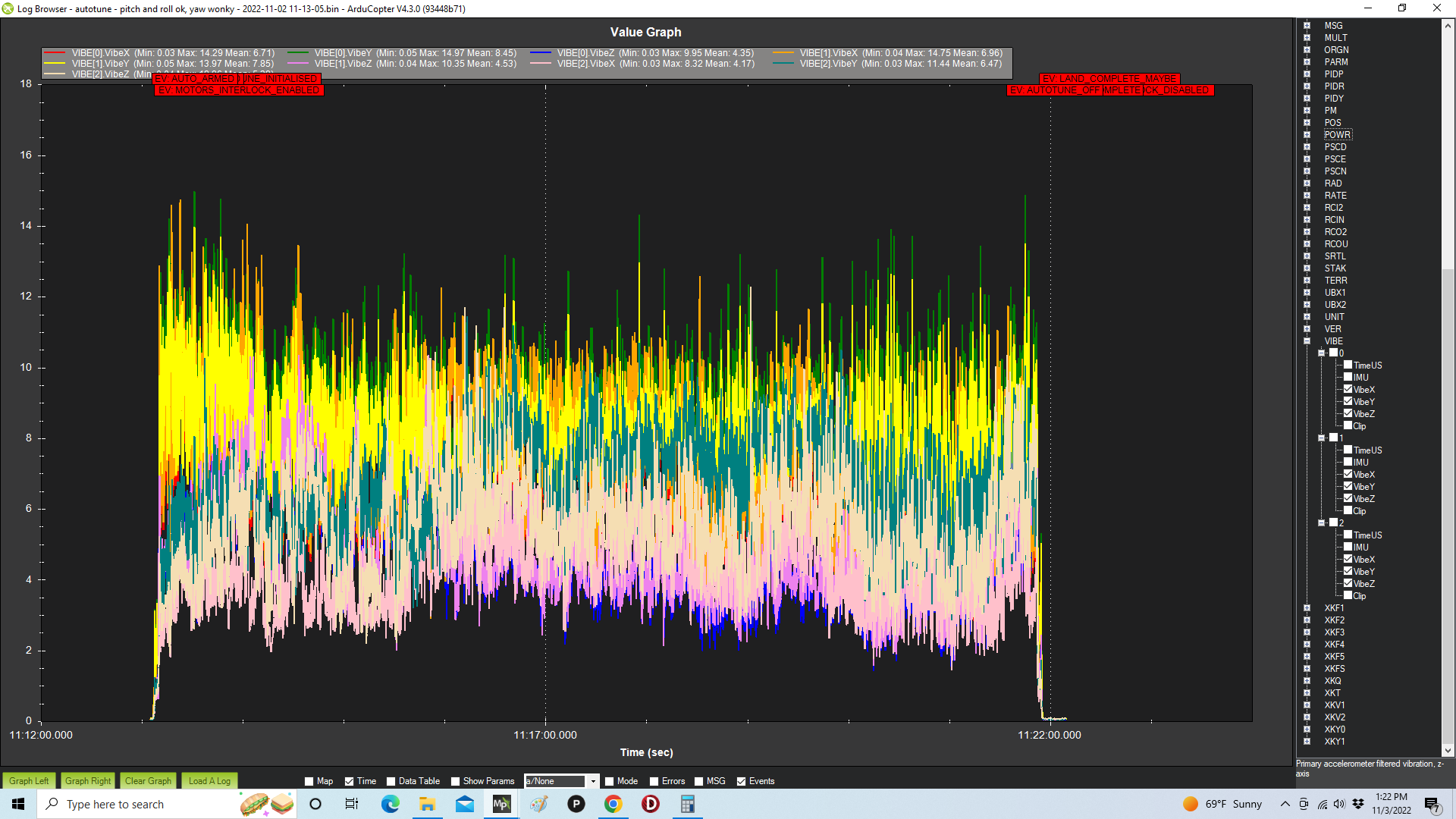
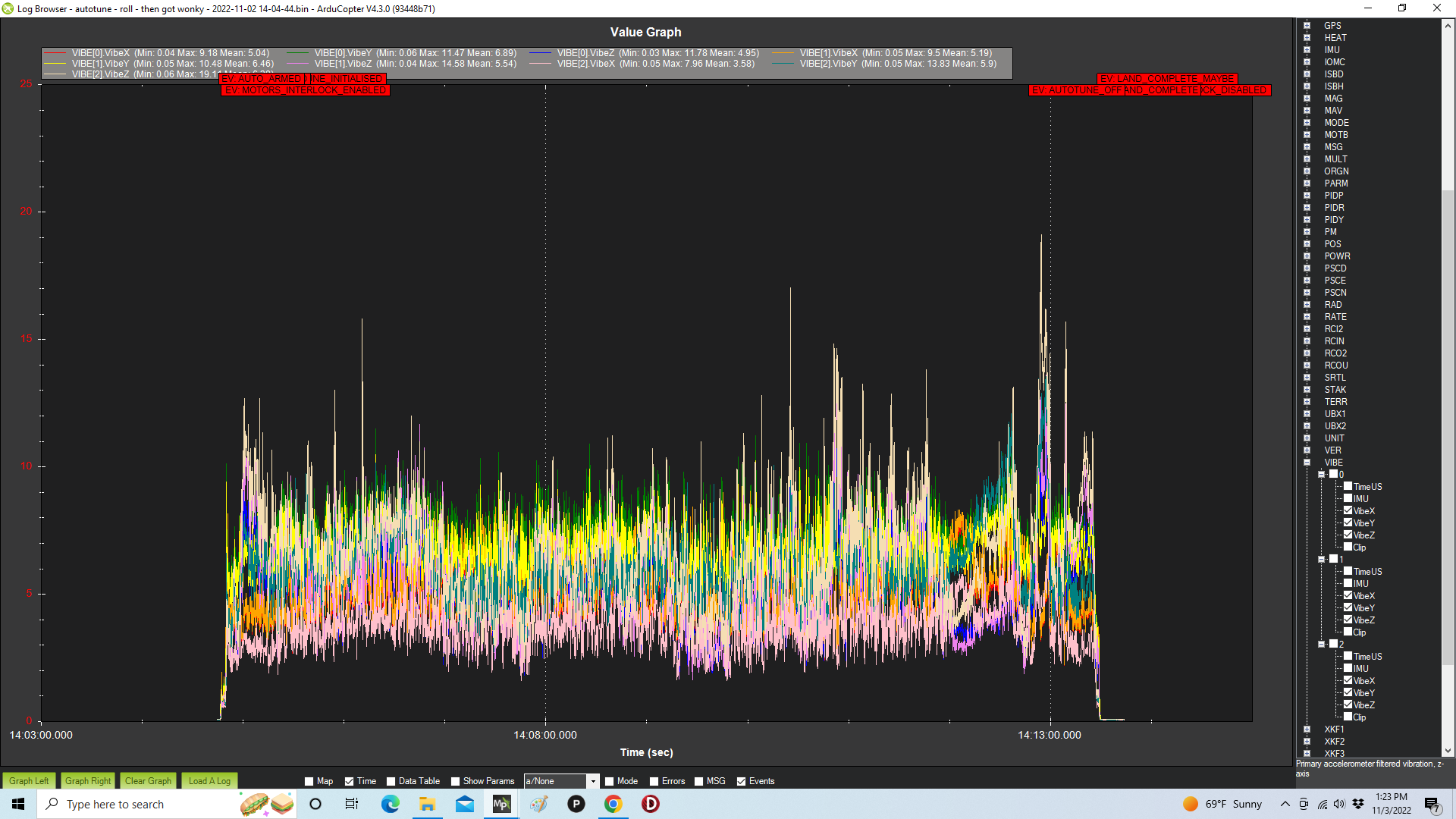
Some times the twitching is a little bizarre - and autotune has to be aborted before all axis are complete.
I don’t have detailed enough notes to totally reconstruct my tests - but I have been keeping records of PIDs from successive tunes.
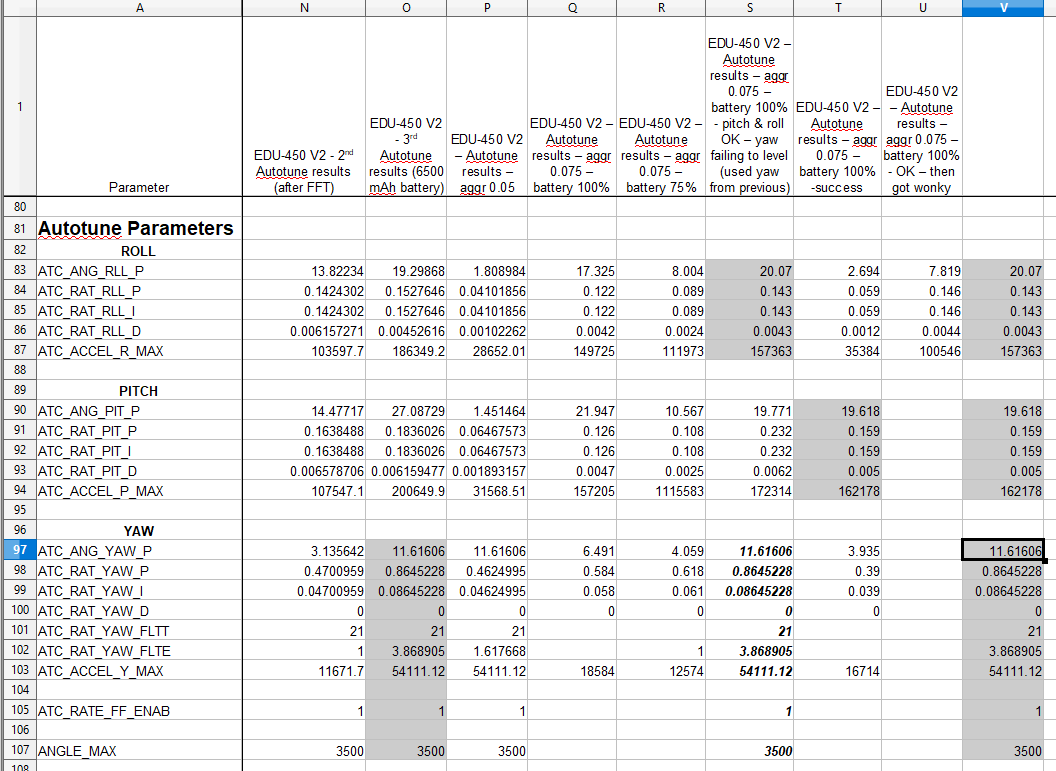
The shaded values are the ones that make the most sense - and they one’s I’ll try again with tomorrow.
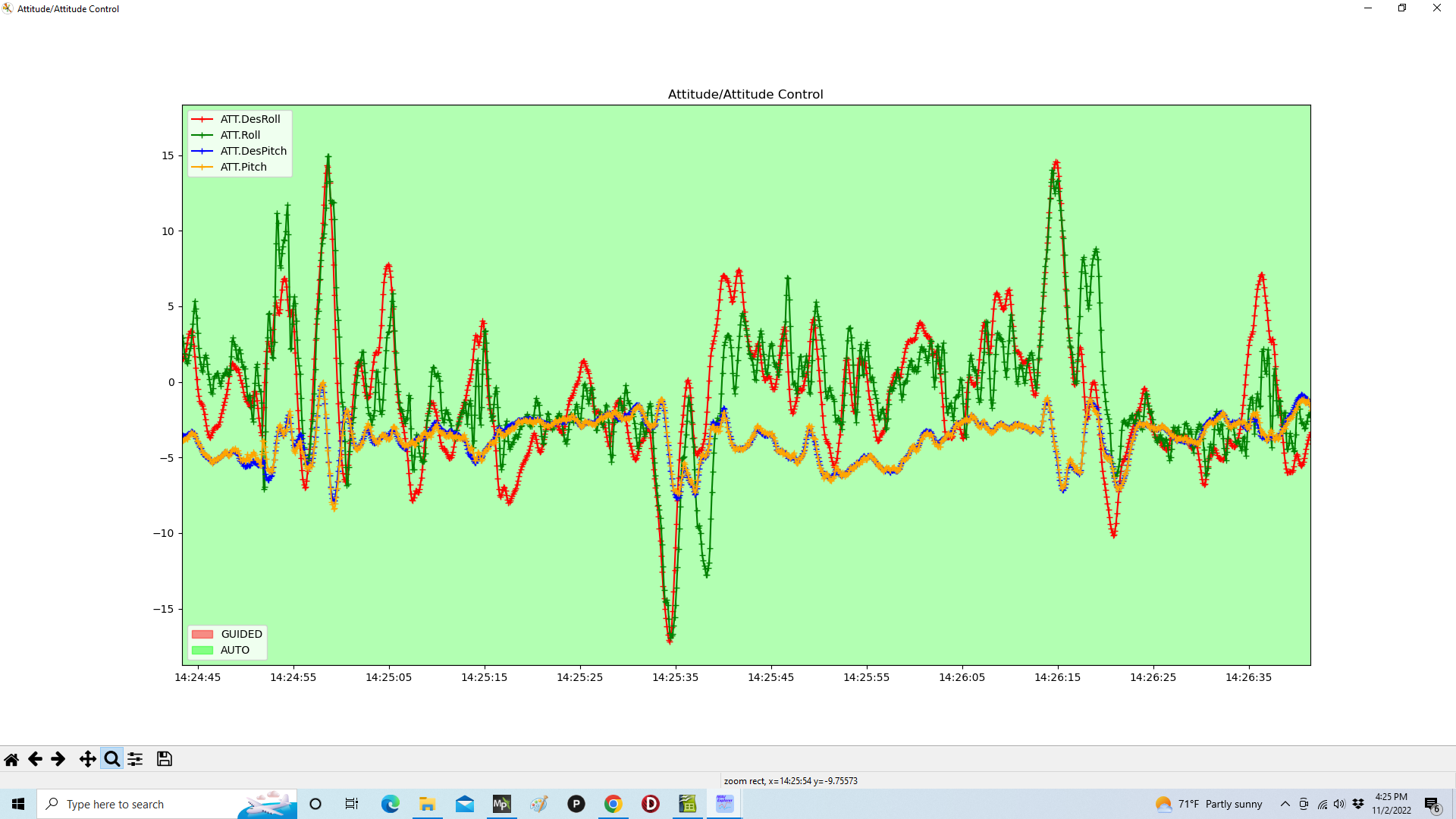
I flew a test mission after completing the autotune in COLUMN-T - where the roll PIDs don’t make sense. The MavExplorer attitude plot confirms that roll is wrong.
Until it’s sorted out - I urge caution.