@dkemxr Dave
Thanks for the help!
The Autotune went well and the copter seems to fly well. I have been following the Blog ’ ArduCopter 7” Long-Range Standard Build’
One thing I am curious about is the negative spikes in the FFT ACC2 graph as below.
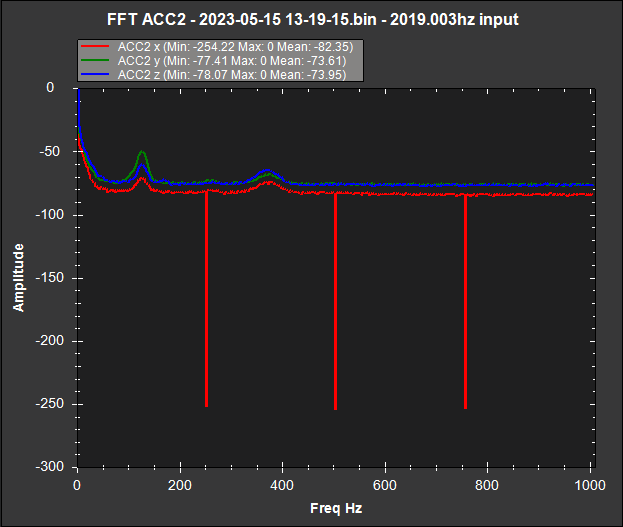
I’m using ESC telemetry for the harmonic notch.
Any idea what the spikes are about??