I’m having an issue where I’m trying to have my UAV follow a target, in both X,Y and Z axes, but the GPS on the target and on the drone output altitudes with different datums.
Hardware:
- UAV:
- Pixhawk Cube Orange
- CUAV C-RTK 2
- Target:
- Pixhawk Cube Orange
- 2x CUAV C-RTK 9Ps
UAV and Target are linked by RFD900 radios, and share the same RTK corrections from a RTK base station (using C-RTK 2 on base station). Both UAV and Target operate with an RTK Fix. There are two 9Ps units on the target, to calculate the target’s heading, since the magnetometer is not reliable when the target is installed on a vehicle. Both CUAV GPS models use the U-blox F9P receiver.
Following in X-Y (North-East) works well, there is no issue there. However, there is a problem with altitude. I am forced to use the “relative altitude” following method (FOLL_ALT_TYPE parameter) and force reset the UAV’s and Target’s origin altitude almost every flight. I would ideally use the “absolute altitude” following method, but when I tried this, the drone would rise very high to reach the same altitude as the Target, yet the Target was at my feet.
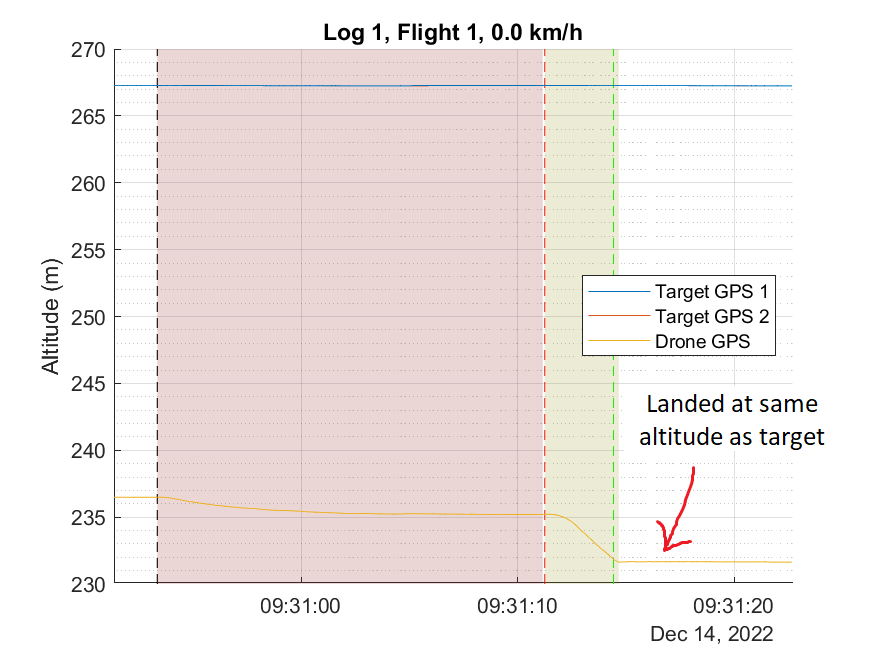
Looking at a log, I started seeing my issue. On the following graph, the moment of the green vertical line indicates the moment of impact when the drone lands. The altitude of both Target and UAV is the same, but not in the graph. According to the logs of each Pixhawk, the Target is roughly 35 m above the drone.
After digging a little, I’ve learnt a few new things. There are different systems that represents the shape of the earth. EGM96 is a complex model representing the sea level as a smooth but
irregular shape (geoid). WGS84 is an ellipsoid which best fits the EGM96 geoid. “Undulation” is the height difference between both models at a specific lat/lon coordinate.
Using online calculators, I’ve found that at the location of the test on the graph, an ellipsoid (WGS84) elevation of 231 m is equivalent to a geoid (EGM96) altitude of 267 m, telling me that the Target’s Pixhawk is logging EGM96 altitude, while the UAV’s Pixhawk is logging WGS84 altitude.
One key main difference between both models of CUAV GPSs is that the 9Ps is serial (Pixhawk directly connected to the F9P’s UART port) and the C-RTK 2 is UAVCAN/DroneCAN. On the C-RTK 2, there is a STM32H743VIH6 microcontroller running the UAVCAN node and logging the F9P’s raw messages to an SD card, allowing for PPK after the flight is over.
From my understanding, depending if I’m using a serial connection to the F9P or UAVCAN, the code from AP_GPS_UBLOX.cpp or AP_GPS_UAVCAN.cpp will be executed. Both seem to consider both an MSL height (EGM96) and an ellipsoid height (WGS84) and calculate an undulation. Undulation is a value that is logged in the GPA structure.
Sure enough, by subtracting the target’s EGM96 logged altitude by the logged undulation, the altitude of the drone and Target match up at the green line on the graph. However, no undulation value is logged in the drone’s log, making me believe that have_undulation = false.
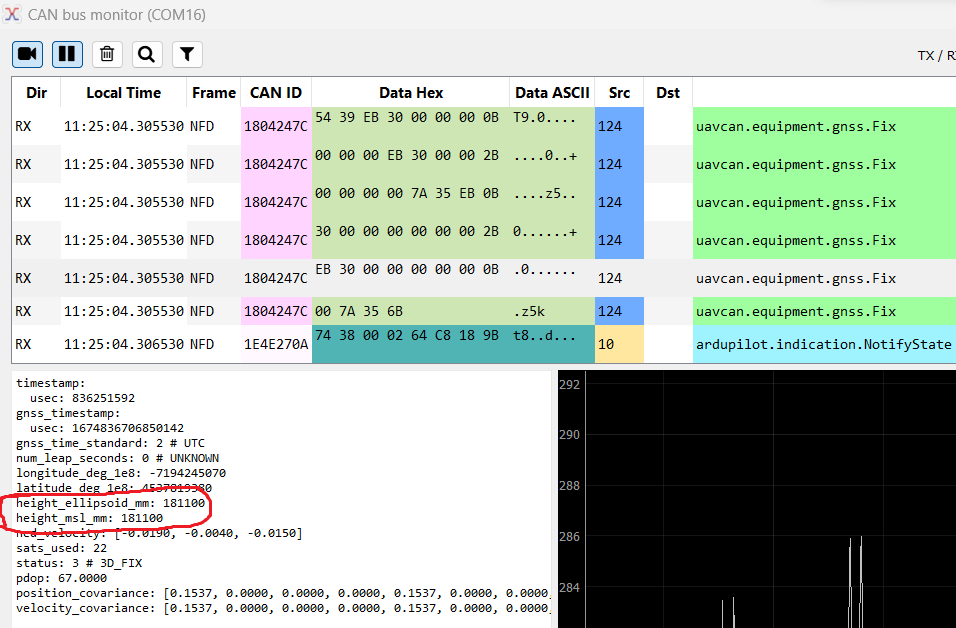
If I understand correctly, the GPS has to provide an MSL height and an ellipsoid height so that Ardupilot can calculate an undulation. I used the DroneCAN GUI to see what exactly the C-RTK 2 is sending to Ardupilot.
uavcan.equipment.gnss.Fix :
uavcan.equipment.gnss.Fix2 :
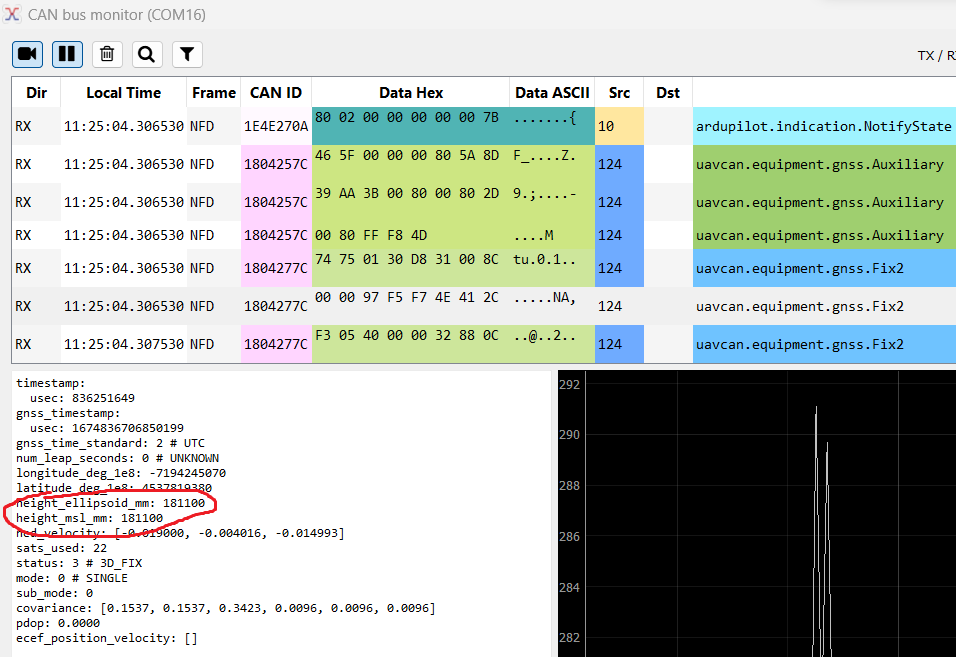
And sure enough, the ellipsoid and MSL heights are there, but they are the same. Maybe the reason why no undulation is calculated? (Note: this is at a different location than in my first graph, hence why the altitudes are different. At this new location, WGS84 (Ellipsoid) altitude = 181m and EGM96 (MSL) altitude = 209m) According to DroneCAN GUI’s webpage, a screenshot of the application shows different MSL and ellipsoid heights.
So, my questions are:
- Does the fault lie in the UAVCAN node on the C-RTK 2? Firmware is installed by CUAV and I do not have access to rewrite the node.
- Is there anyway for me to install my own UAVCAN node on the C-RTK 2? Or is there any open-source nodes available for the C-RTK 2?
- Would a custom/open-source node disable the SD card writing function on the C-RTK 2? It is useful for me to log the raw GPS messages for doing PPK later. Or does the UAVCAN node on the C-RTK 2 not affect the SD card writing function?
In an effort to start answering my own question, I’ve found firmwares/binaries for the C-RTK 2 in the Ardupilot firmware repository. Are these firmware updates for the uavcan nodes? Or are these firmware updates for Ardupilot to be able to communicate with the node? If these files will update the node’s firmware, how do I know what the code does? Will it produce proper MSL and ellipsoid heights? Will it still save the F9P’s raw messages on the SD card?
I’m a bit lost and don’t know how to proceed.
Thanks in advance!