Thank you so much for your help Dave.
Cheers !
One more question Dave , you mentioned the frame type ,if my ESC Battery tabs were facing the rear. They are actually facing the front of the drone, so should I still use the BetaFlight X ?
Thanks again.
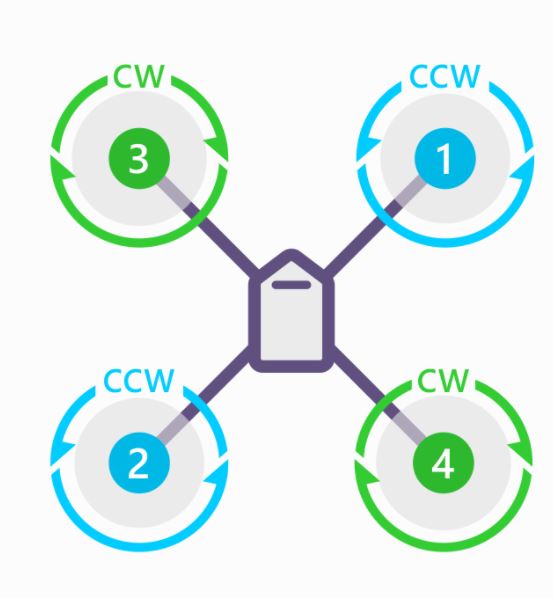
No, don’t bother then. Just use normal X and you will have to re-order the motor outputs to suit. As I mentioned use the Motor Test Function in Mission Planner and re-order as required so it’s correct.
This is what you have then. So I supoose you will have to swap 1&3. Use BLHeliSuite to reverse the motor directions as required.
yes thats it , ok in BL Heli 32 suite which interface should I use to connect via the usb connection on the pixhawk. , the Betaflight/Cleanflight or USB/COM or 4 Way If.
Betaflight but it should recognize what it’s connecting to. The only 2 parameters you should have to set for passthru to work are:
MOT_PWM_TYPE (pick a Dshot protocol)
SERVO_BLH_AUTO (1)
so SERVO_BLH_MASK stays at 0
SERVO_BLH_OTYPE stays at 0
SERVO9_FUNCTION stays 0
SERVO10,SERVO11,SERVO12 stay at 0 also
No sorry. Servo function 9-12 need motor assignments. Mask and otype ore not required typically for your type of setup.
awesome ,thanks a lot. I’ll give it try.
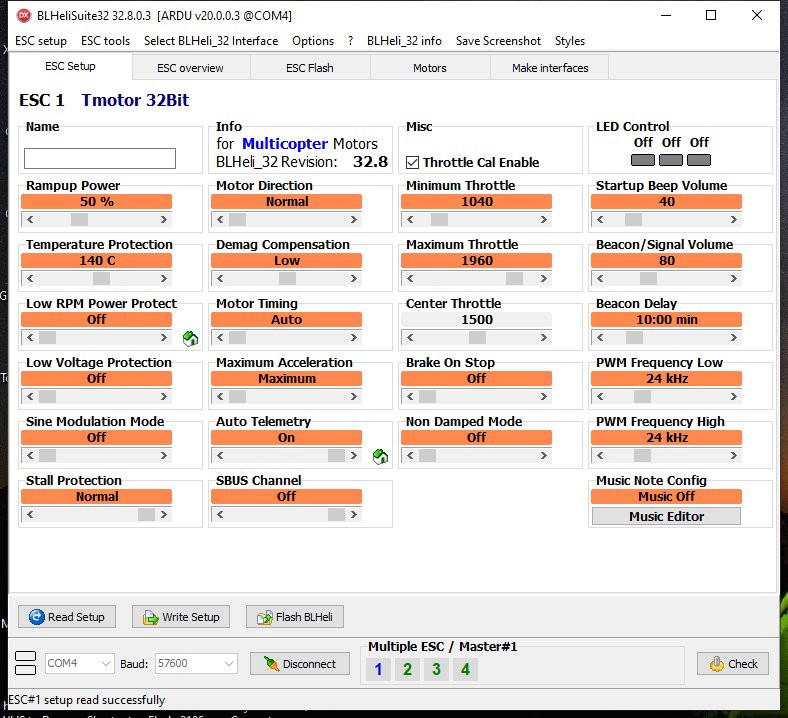
so in mission planner it looks like this
2021-05-21 4:09:29 PM : Frame: QUAD
2021-05-21 4:09:29 PM : RCOut: PWM:1-8 DS150:9-12
2021-05-21 4:09:29 PM : fmuv3 00430037 52565017 2036394B
2021-05-21 4:09:29 PM : ChibiOS: d4fce84e
2021-05-21 4:09:29 PM : ArduCopter V4.0.7 (0bb18a15)
2021-05-21 4:09:28 PM : EKF2 IMU0 tilt alignment complete
2021-05-21 4:09:27 PM : Frame: QUAD
2021-05-21 4:09:27 PM : RCOut: PWM:1-8 DS150:9-12
2021-05-21 4:09:27 PM : fmuv3 00430037 52565017 2036394B
2021-05-21 4:09:27 PM : ChibiOS: d4fce84e
2021-05-21 4:09:27 PM : ArduCopter V4.0.7 (0bb18a15)
2021-05-21 4:09:27 PM : EKF2 IMU0 initial yaw alignment complete
2021-05-21 4:09:25 PM : GPS 1: detected as u-blox at 115200 baud
does that look ok
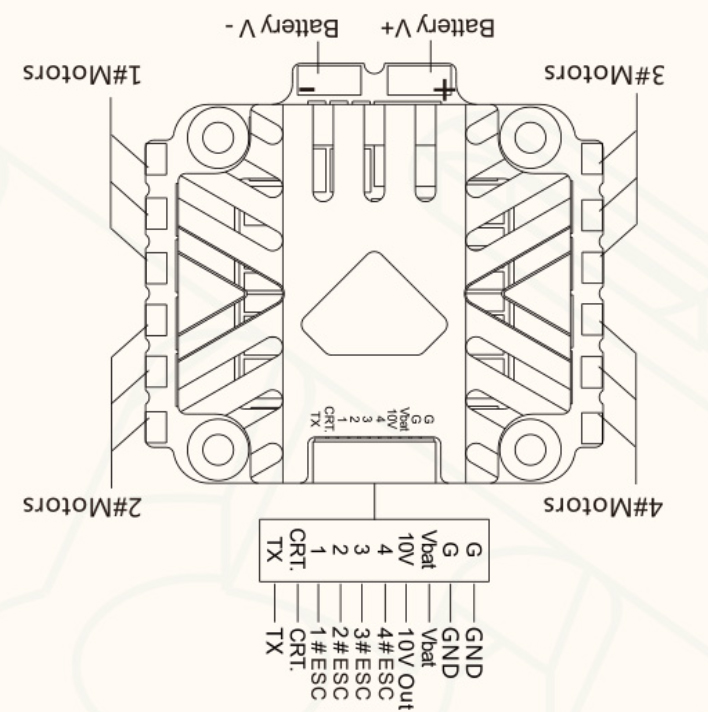
ok so I had the ESC wired up before, with a ground wire and signal to each of the servo outputs. When I had it wired that way ,I was able to connect to the ESC via BLHeli 32 suite and flash the latest 32.8 BlHeli.I was getting differant reads outs at different times.
This screen shot shows Oneshot24 as the input Protocol on only the Master ESC!
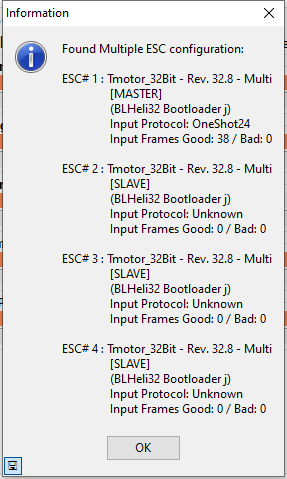
Then I would reboot the pixhawk and check againin BLHeli suite and the input Protocol would changed
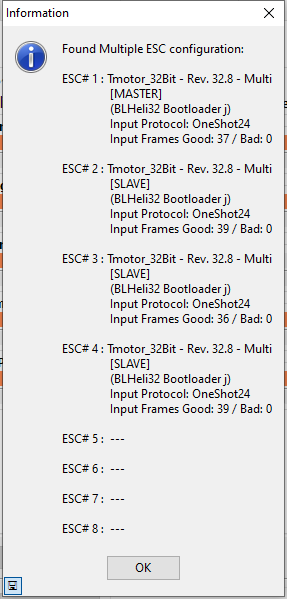
Then another reboot and I get this
This won’t make any difference. The Gnd rail in the Pixhawk is a common bus.
What version of Arducopter did you flash on the Pixhawk?
The Aux outputs are being recognized as Dshot but try Dshot600 instead of 150.
arducopter 4.0.7 , for some reason after removing the other three GND wires , now it will not connect to ESC
I don’t think it has anything to do with the ground leads. It’s most likely a problem between the Flight Controller, the Version of Arducopter you are running, the ESC hardware and the ESC firmware.
Read the last few posts in this thread. The Dev has some interesting things to say:
You could try 4.1.0-dev and a few different Dshot protocols.
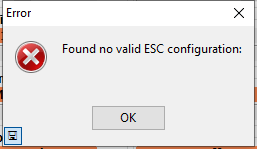
Hi Dave, again thanks for all your help. Before I try 4.1.0 , i just tried to connect to BL Heli 32 Suite and this is the error I’ve been getting lately
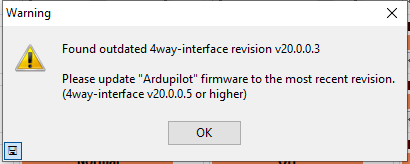
I’m running 4.0.7 , not sure what that error refers to.
Ok ,so I tried 4.1.0 Beta and still the ESC will not read on BL Heli 32 Suite, I get this error
I know the ESC should work on BL Heli suite , it was listed in their history of updates T-Motor 45A 4in1 ESC V2 is listed there, so not sure why I keep getting this error.
Hi guys, I aalso just bought a Velox 4in1.
II use S7 to S10 for motor output. Is it possible to use thise outputs also for BLHeli32 on my Matek H743 WING?
Thanks.
Okay I can confirm that it works with S7, S8,S9 and S10 on Matek H743 WING and I found out why I couln’t flash my ESCs.
I have to use BLHelisuite32 Releases · bitdump/BLHeli · GitHub
instead of BLHeliConfigurator.
With BLHeliConfigurator I could read the data but the values were empty and I could not upload new data. What is this BLHeliCinfogurator for?
Which BLHeli protocol is the best to choose? I chose DShot600, is it the right one?
DSHOT600 is correct
It’s best to use BLHELI32 suite - I think the Configurator may no longer work, the last time it was updated was 2019. I know the BetaFlight configurator is no longer used since Chrome has changed how add-ons work.
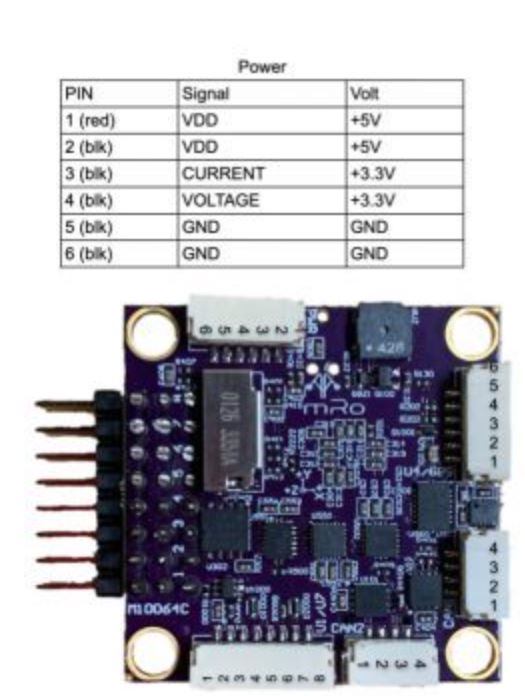
Do you know where to place this wire to the Pixhawk pro? I’m getting current and power from the Power Module V1.0.