We are worried about connecting our tail servo up. With our previous setup we explicitly set the frequency for the tail servo on the spartan prior to connecting it (this is independent of end/midpoints). The other servos are 1520s and these are receiving direct control from the pixhawk. Our faster tail servo is a 760 and we are worried that if we connect directly to the pixhawk, the native frame rate/frequency will burn out the tail servo before we even get to set endpoints etc. Is there a way in Ardupilot of setting an independent frequency per servo? If not we may have to include the Spartan just in cater for this.
The frame rate is defaulted to 125Hz and works for all servos on heli’s. You can set it to 333 if you want your servos to run hotter, and die early. That is set with RC_SPEED. Typically, 3D pilots run them as fast as they can go and they hope to get 200 seven minute flights before a servo burns out.
The actual speed of the servo depends on design. The controller in the 760uS servos runs them at 566Hz and they can handle 566Hz frame rate as well. But they run very hot because the motor is receiving high freq signal from the servo’s controller. Setting RC_SPEED to 125 or 333 won’t make one bit of difference you can tell in the speed of the servo, other than it will run way hotter at 333 than it does at 125.
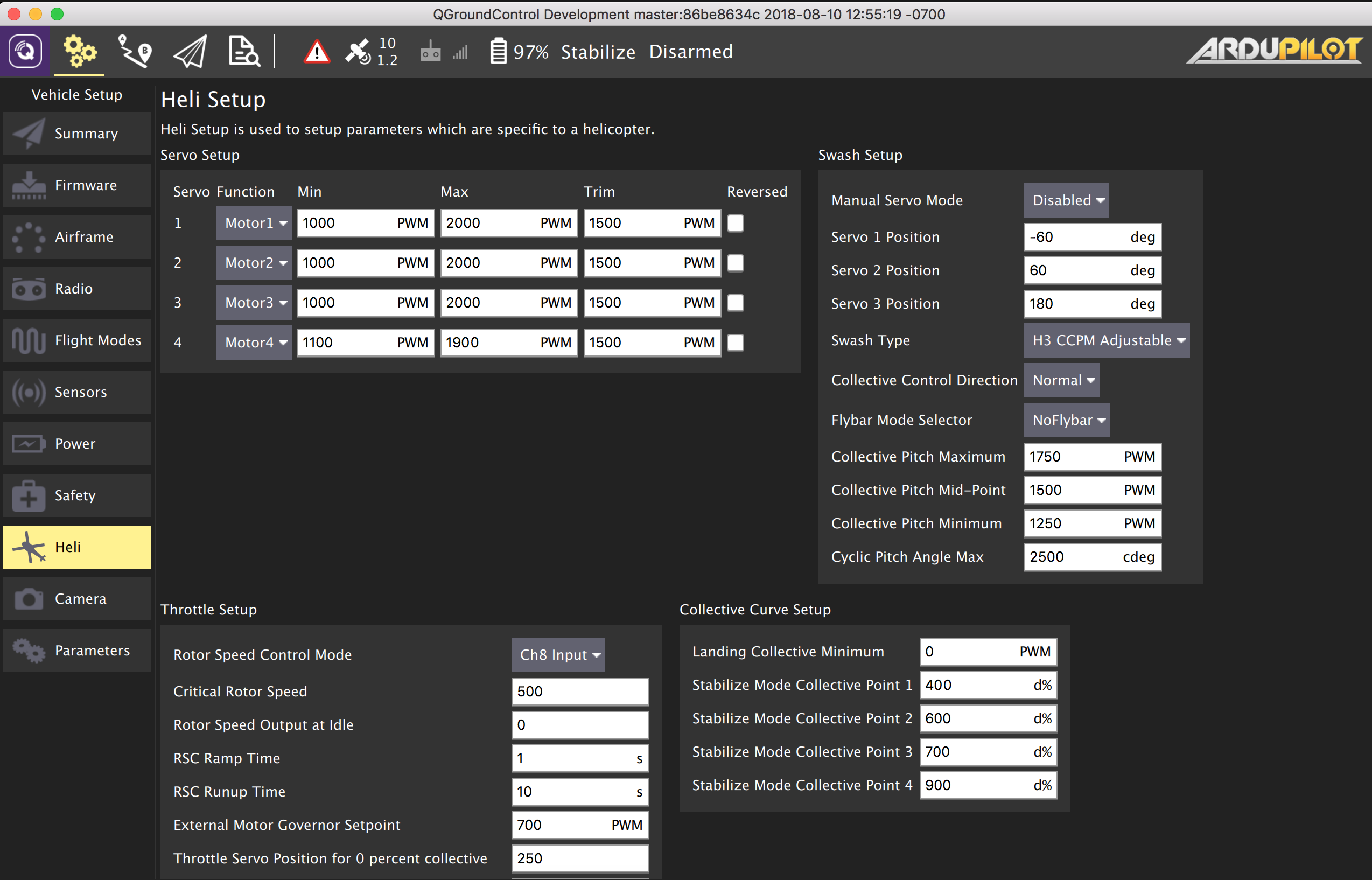
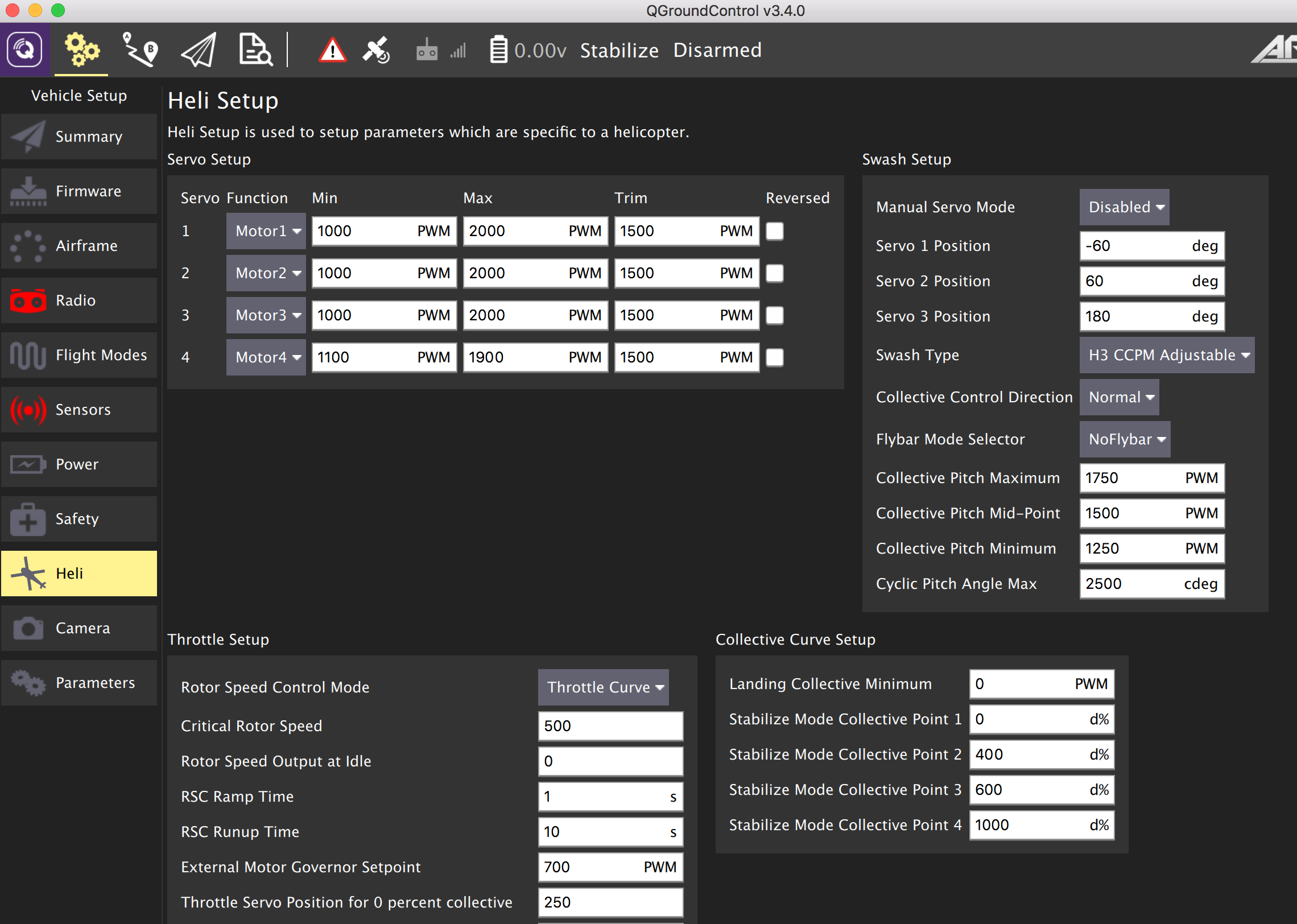
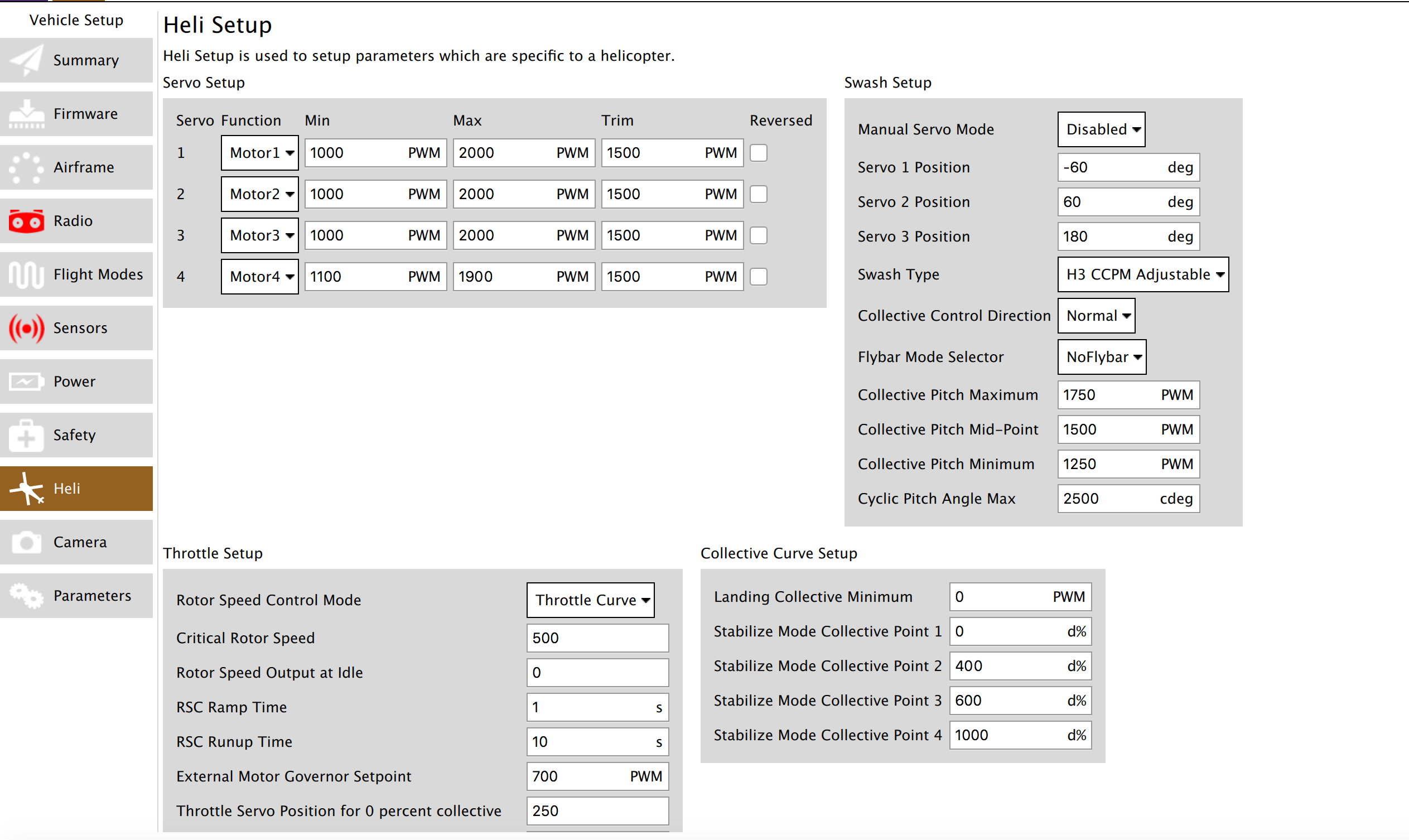
The pwm signal to the servo is important so it doesn’t burn out. If you feed a 1500 trim signal to a 760uS servo it will instantly torch it. So make sure you set the SERVO4 min/max/trims for 760 before you hook it up.
Also, the sweep time of the servo is dependent on voltage to it. If you look at the specs for the sweep time, the servo is faster at 8.4 volts (HV servos) than it is at 6V. This has nothing to do with the frame rate, however. Frame rate only has to do with how many times per second the servo receives updated position information.
Jon, just to be clear on servo speed, there’s a lot of mis-information that has been spread in the RC heli business. If you have ever seen Nick Maxwell fly a no-gyro Raptor 90 nitro flybar with signals to the servos coming direct from the radio receiver at 50Hz frame rate, you’d swear that Raptor 90 is 3x faster and quicker than any modern FBL setup. When in reality it is just as fast, but with a highly-skilled stick banger at the controls.
The marketing push has been to higher frame rates and speed to sell equipment. And by and large, the RC heli consumers have fallen for it and believe it to be gospel. But in the real world if the servo can’t do it’s job at 50Hz update rate, it can’t do it at 333 or 566 either. In ArduPilot the outputs from the rate controller are low-pass filtered at 20Hz by default, so set your RC_SPEED (servo frame rate) at 125, then try it at 333 and see if you can tell any difference. You can’t unless you are a highly skilled 3D pilot and can tell the difference in response measured in milli-seconds on your control inputs.There is only a handful of RC heli pilots that have ever reached that skill level, and certainly no autopilot system ever devised can match these chosen few.
if the plate is thick aluminium so it has plenty of mass, then thats all that it needed, if not then add mass using lead weights. I use the 25g stick-on ones for car tyres. The lead weights need to be rigidly attached to the autopilot
It does very much depend on the individual vehicle though. Testing with ground spin-up to full head speed and checking the vibe logs is a good idea.
Cheers, Tridge
I’ve also used this method and it works quite well. I discovered velcro works even better one day when I was doing some testing and needed to swap out flight controllers easily. How can I do an easy swap without prying the controller off the foam pads? That’s when I spied it hanging on the wall - velcro!
I stuck it on there and amazingly the vibes were just about non-existent. Couldn’t believe it. So I tried it on another helicopter and got the same results. Can it work three times? Tried it on a third one and still got the same results. So my theory ever since has been, why try to over-engineer a flight controller mount? Just use velcro
I usually combine the two. I attach the metal plate to the flight controller with velcro.
I’ve found just using velcro is inconsistent. If you get a resonance at the wrong frequency then things go bad very quickly.
I do use just simple velcro on my beaten up test aircraft quite a lot, but I wouldn’t use it on aircraft that will either cost a lot or take a lot of time to rebuild.
I use velcro on my Soxos600 with a Pixhack V3 and it’s more than enough. Granted, the Soxos also has a vibration-dampened tail boom/rotor setup which helps a lot.
An update. We flew yesterday. Initially we tried the foam tactic suggested by Tridge using some foam we had lying around (not the specific stuff suggested and no weighted platform). The vibes where pretty bad and probably not flyable. We therefore swapped back to the ill-advised rubber gromit mounted platform in our photo just to get the thing off the ground. We have completely removed our FBL from the setup so spent the previous day bench testing, reconfiguring and watching Chris’s videos.
We initially very carefully spun up on the ground gradually increasing the throttle to around 70-80%. This resulted in extreme tail wag. We reduced ATC_ANG_YAW_P progressively until it was way below the recommended minimum but the aircraft flew and the tail wag was manageable. With these settings we even managed a successful Loiter and RTL (no landing at this stage). The rapid z axis oscillations on automated modes were gone.
I was nervous about how far we were from the recommended minimums so I decided to land, reset the values and tweak ATC_ANG_YAW_P incombination with ATC_RAT_YAW_P using a dial on our TX.
We span the rotors up and at around 40% throttle the aircraft lifted a few centimetres off the ground, steady as a rock and just sat there perfectly. I commented to our pilot Paul how good it looked at which point he said “thats not me” and moved the control sticks through their full movement with no effect. This presented us with a bit of a problem. The heli was hovering PERFECTLY but completely out of control. We stood there scratching our heads for a moment then I ran to get a jacket to throw over the blades. After a short further pause trying to decide what to do, the heli landed perfectly and disarmed.
After a little investigation we found a lead had vibrated loose between the RX and the Pixhawk. The TX was telling us that the aircraft was receiving the commands but they were not arriving at the Pixhawk. The aircraft had loitered and after a tomeout landed as designed. We fixed the lead and flew again at the higher operational throttle. The wag was back.
From this I can assume that the Pixhawk is flying the Heli well in terms of commands and GPS updates etc. However there are problems at higher RPMs probably related to vibration and/or the loosely restrained Pixhawk platform oscilating on its mounts during rapid yaw corrections.
Our current plan is to remount the controller in on a velcro pad on top of a weighted, foam supported platform as suggested by you. We will vibration test this on the ground and once happy we will fly.
Unforetunately I am now away for 2 weeks so there will be a slight lull in updates. I would like to thank you again for all your advices and assistance.
Yeah, which it appears to me was “heavily inspired” by my website. Used to be they even used very similar icons…
On redundancy, does it have redundancy on the tail drive system or servo? IMO, that was always by far the least reliable part of a helicopter. In 7 years, I’ve never had a motor, esc, servo, or main driveline system failure. But the tail rotor drive fails if you look at it the wrong way.
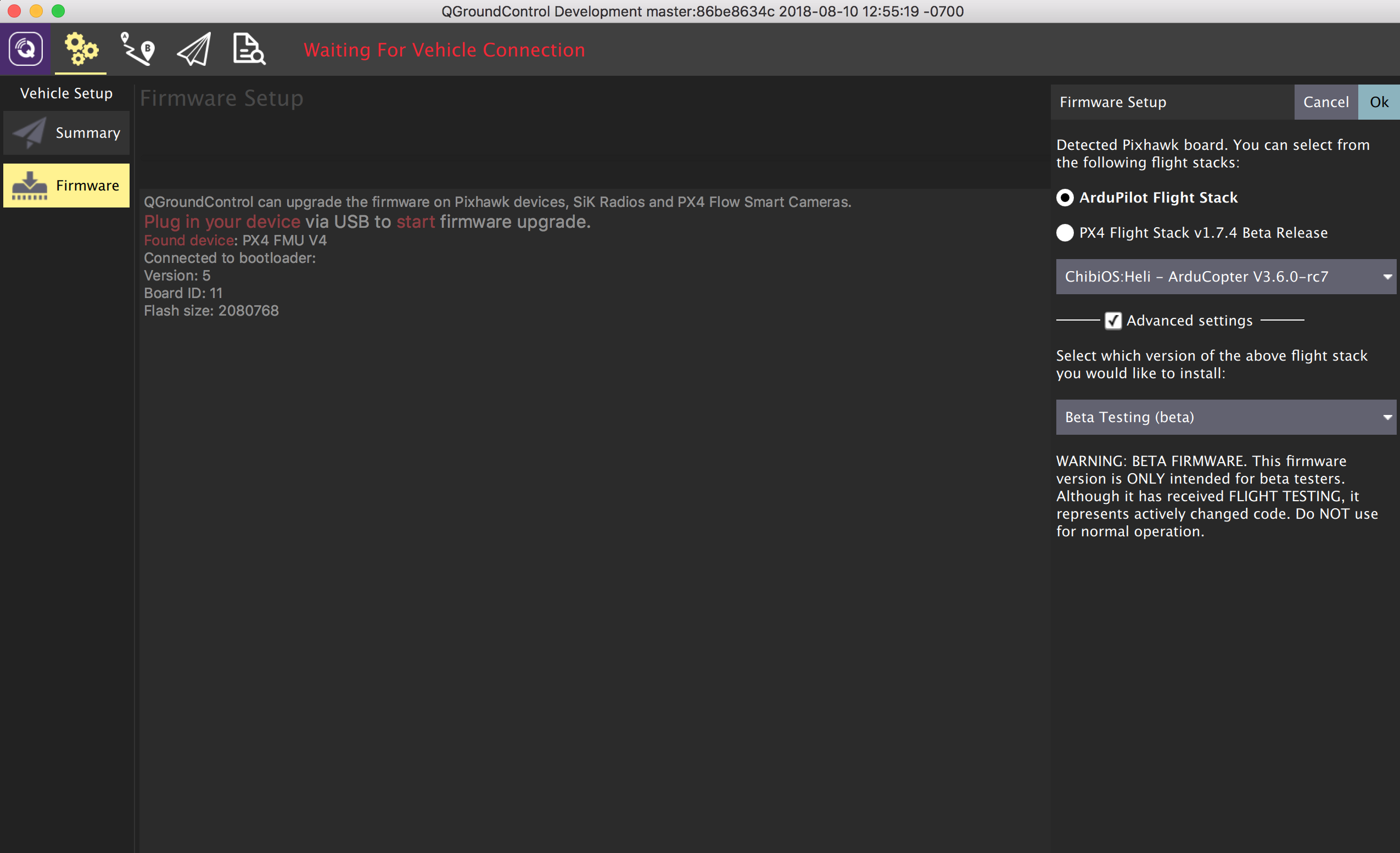
Most important thing is which ArduPilot version you will use. I would sincerely recommend to go to 3.6RC, where Chris and Bill came up with a new set of parameters that work really well for many helis.
best
Luis
ps: you should post your logs and videos here. Quite impressive
This is not officially supported by ArduPilot. But you have to set H_FLYBAR to 1 to use flybar mode. Then turn off the ATC_RAT P-gains, I-gains and D-gains by setting them all to zero. And set the ATC_RAT VFF gains to at least 0.3. Some recommend setting the VFF’s to 0.5 depending on the FBL unit.
Before you do this, the FBL unit must be properly tuned, and it must provide rate-only control with no attitude holding, or it won’t work. If the FBL unit provides an attitude “hold” solution it will fight with the ArduPilot controller and cause all sorts of interesting issues.
Luis
I am using MissionPlanner usually but like to checkout QGC 3.4.0 version. I have the 3.3.0v. installed. How can I upgrade to the latest. Just cannot figure that out at the moment.