Hi everybody, I have been flying an octa quad with arducopter 3.4.6. Everything flies smoothly, except I can’t figure out why the system does an hard break as soon as it reaches the waypoint in Auto mode. I tried to set the wp radius to 2 meters or 5 meters, but it does not change the behavior.
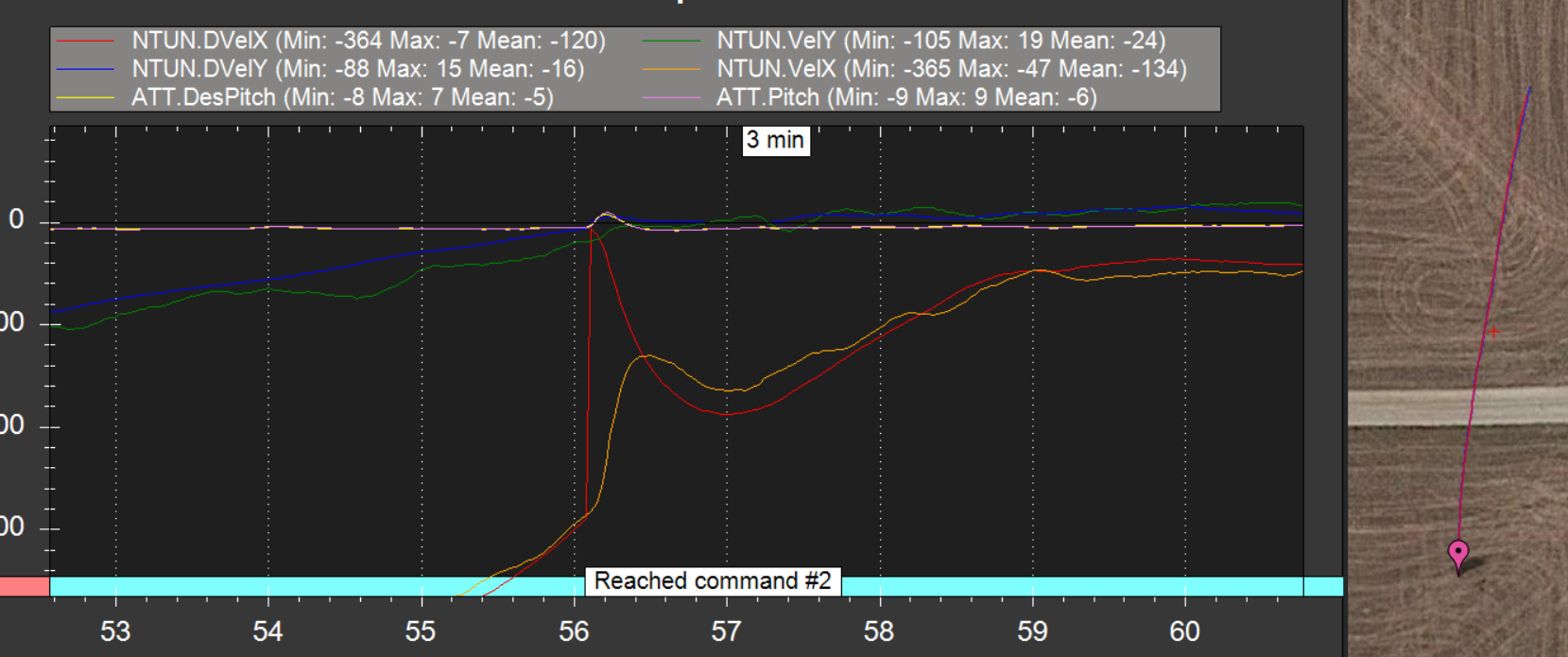
Here is a screenshot of the telemetry: you can see that DVel is driven to 0.
Here is the bin and log: