Hi all, I am experiencing a strange issue with my Pixhawk (Arducopter 3.4.6) copter.
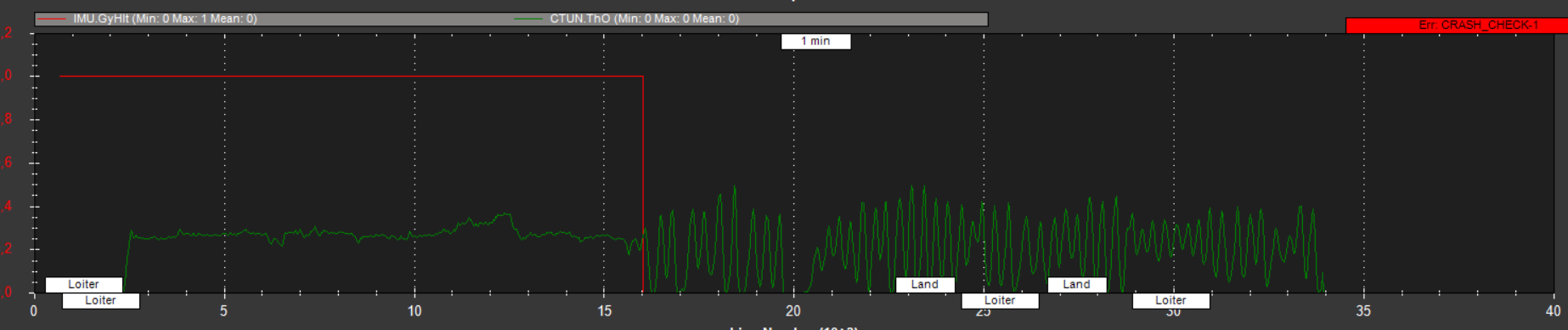
during the last 2 flights my quad went out of control after a couple of minutes of good flight. I can see Gyro and Acc health going down but I can’t figure out why. After that behaviour the copter become very instable and I managed to land in emergency braking 2 props and the gimbal support.
Just from the log analyzer, there’s nothing wrong except the crash you mentioned and the motor pwm differences from the average.
Size (kb) 2806.158203125
No of lines 34544
Duration 0:01:47
Vehicletype ArduCopter
Firmware Version V3.4.6
Firmware Hash e707341b
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (17.09%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: CRASH
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.27, WARN: 0.75, FAIL: 1.50)
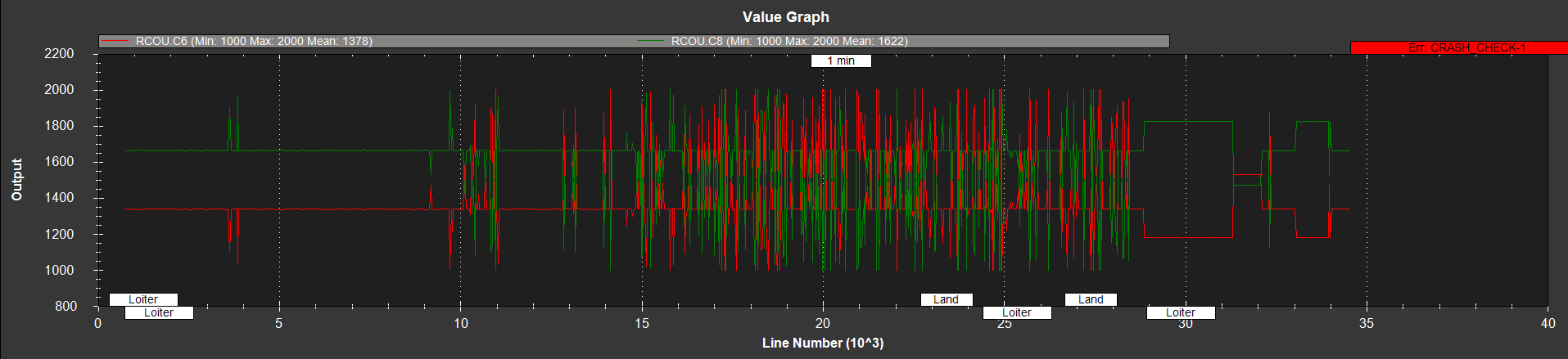
Test: Motor Balance = FAIL - Motor channel averages = [1548, 1458, 1422, 1387, 1377, 1622]
Average motor output = 1469
Difference between min and max motor averages = 245
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = GOOD -
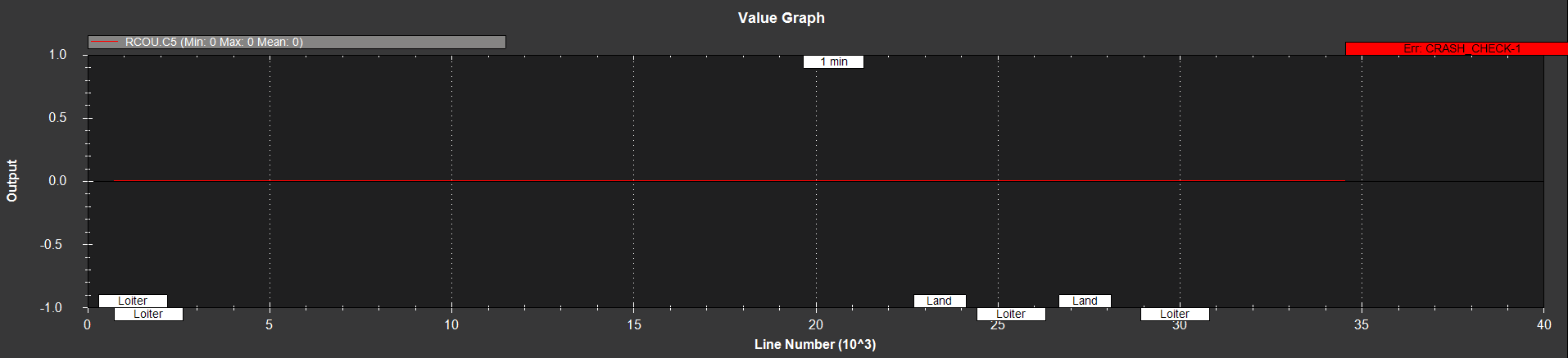
However, when I tried to check for any error from motors or ESC (by having a saturated signal value) I found that there’s something really weird with your motor outputs: you have signal from C1, C2, C3, C4, C6 and C8. I was expecting to see a signal from C5, but it’s always 0.
I will check the wiring from the pixhawk to ESCs as soon as I get back from office this afternoon. Just a question, I only have 4 motors, is it normal to have 8 motor outputs enabled?
It’s weird since the log analyzer shows 6 PWM outputs. I have never used the main channels for anything else than motors, so I may be wrong. Are you using RC6 and RC8 for a servo or another actuator which needs a signal from the Pixhawk?