Hey,
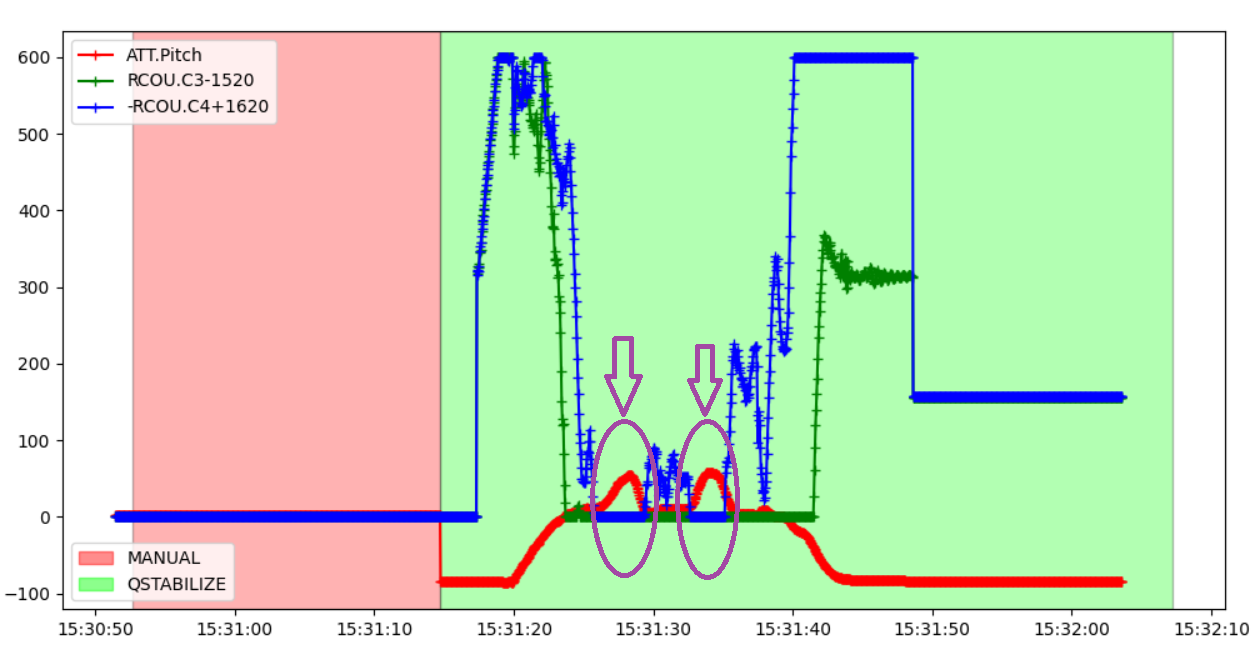
I am working on a vectored tailsitter. The two tilt-rotor servos move only to the trim value (forward flight position) but not further (see picture). Therefore the plane is always flipping backwards when I slowly raise the throttle at liftoff.
Nobody any suggestion why my vectored motors only work down to the trim value when vertically?
Servo1-2 Elevrons
Servo3 Function: 75 min/tim/max: 920 1520 2120
Servo4 Function: 76 min/tim/max: 1020 1620 2220
Servo5-6 Motors with dshot600
If I run the tilt servos from a servo-tester they run from up90° to down90° but somehow the stabilization lets the servo only run from up90° to 0°…
thanks for any help from the vectored Dual-motor tailsitters pros
btw: FW ArduPlane V4.5.2 on a Holybro Kakute H743 wing
Yes I found out after a lot of frustrating hours
SERVO_BLH_AUTO,0 (I had it on 1 and it did mess up my mask mapping)
Depending on our FC you have different groups for Servo & Motor output. With mine I have it set as follows:
• PWM 1-4 in group1 CH 1 & 2 Flap-Servo / CH 3 & 4 Tilt-Servo
• PWM 5,6 in group2 Motor with bi-dshot600
SERVO_BLH_AUTO,0
SERVO_BLH_DEBUG,0
SERVO_BLH_MASK,48 for channel 5&6 for dshot
SERVO_BLH_BDMASK,48
SERVO_BLH_TRATE,0
SERVO_BLH_OTYPE,6 (dshot600 given by SERVO_BLH_MASK)
Q_M_PWM_Type,6 Dshot600
SERVO_DSHOT_RATE,2 double loop rate
When you boot your plan you should see in MP Message-Tab: “PWM1-4, dshot600 5,6” If not your settings are still wrong.
Hope it helps you and you can avoid the frustration I had…
Matek H743 Wing. I have channel 1/2 as throttle (and set to BDshot) which is group 1. I get the correct messaging as Dshot 1/2 pwm as the rest on boot. Will go have a play and move them around, see if anything changes.
Sorry to hear. Maybe you can try a parameter reset?
I guess you have the tilt-servos trim around ~1500 for forward flight?
If you like you can post a bin file of your test an I will try looking into it?