After solving althold issue took my quad for a spin. Relative good althold, bad loiter (no compassmot). Briefly switch to RTL to get back to stabilize when control was lost resulting in crash. Vcc error reported. Could this be the cause ?
Here is the log , some help will be greatly appreciated!
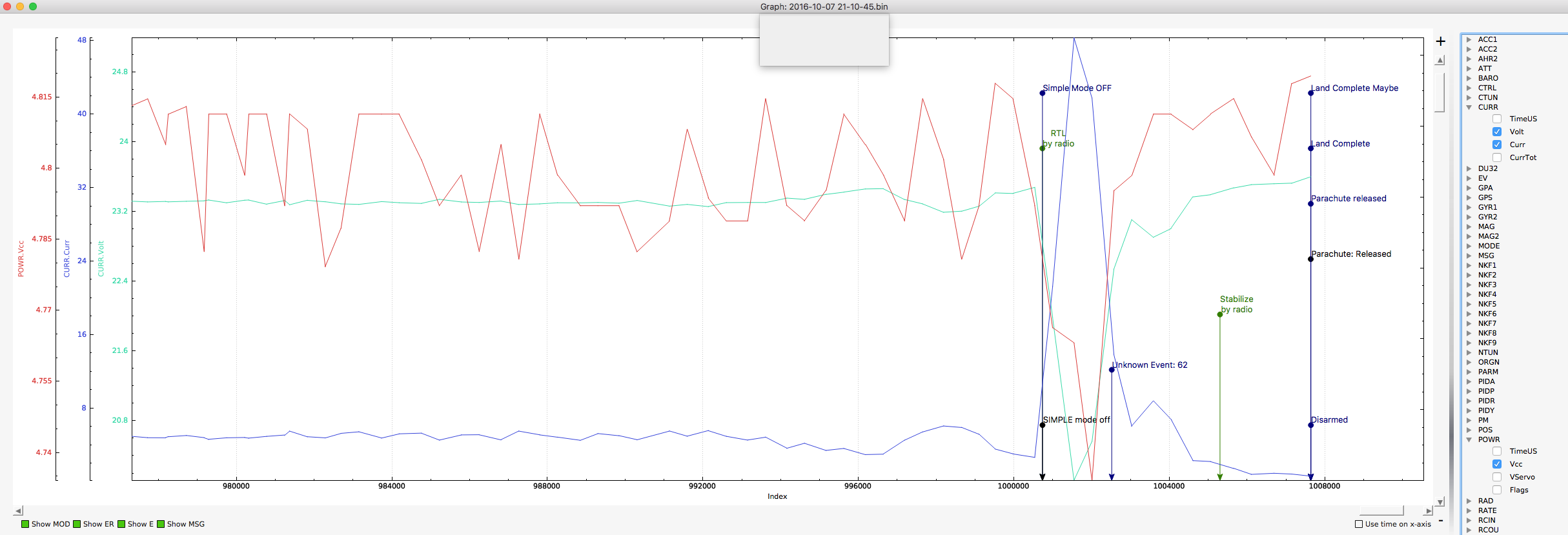
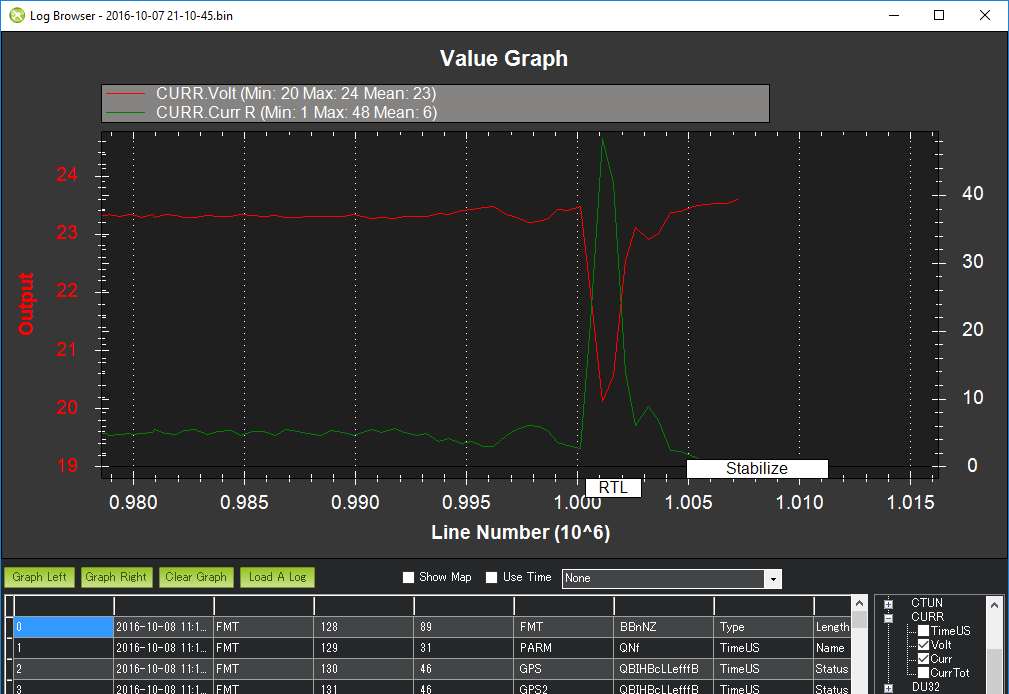
Looking at the logs I see some power event just after your switch to RTL.
You have a very large current surge coincident with a large voltage drop.
Your VCC only drops to 4.7 which is still in the functional range but may have generated the error but I don’t think is the cause.
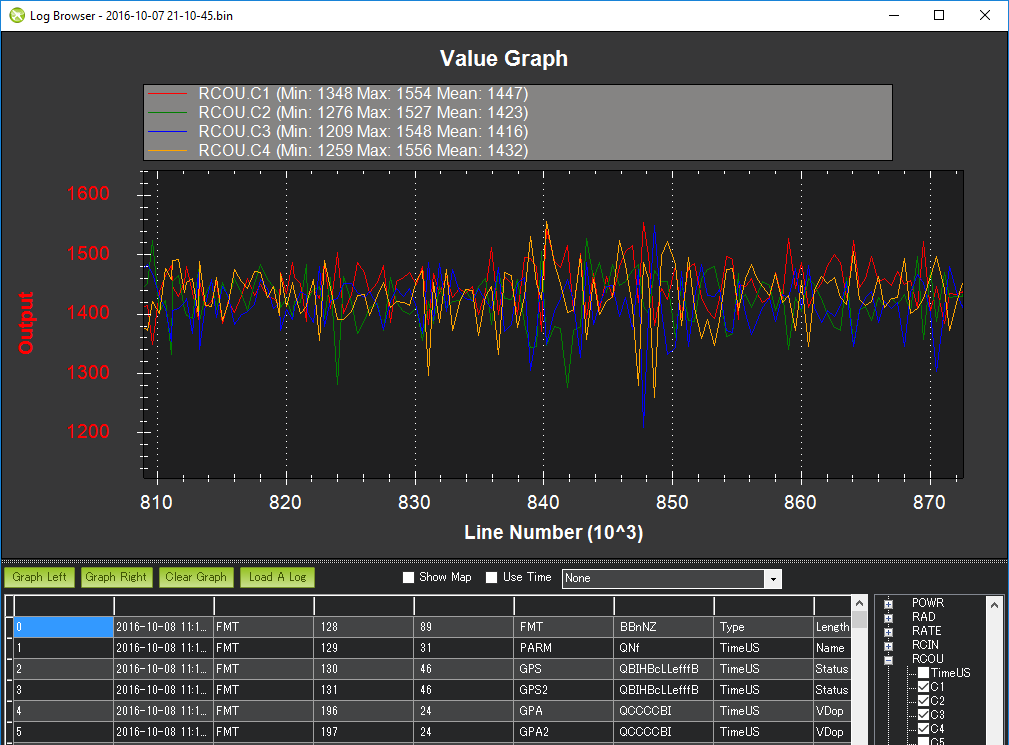
The quad looks to be unbalanced as motors 1 & 3 are working much harder than 2 & 4.
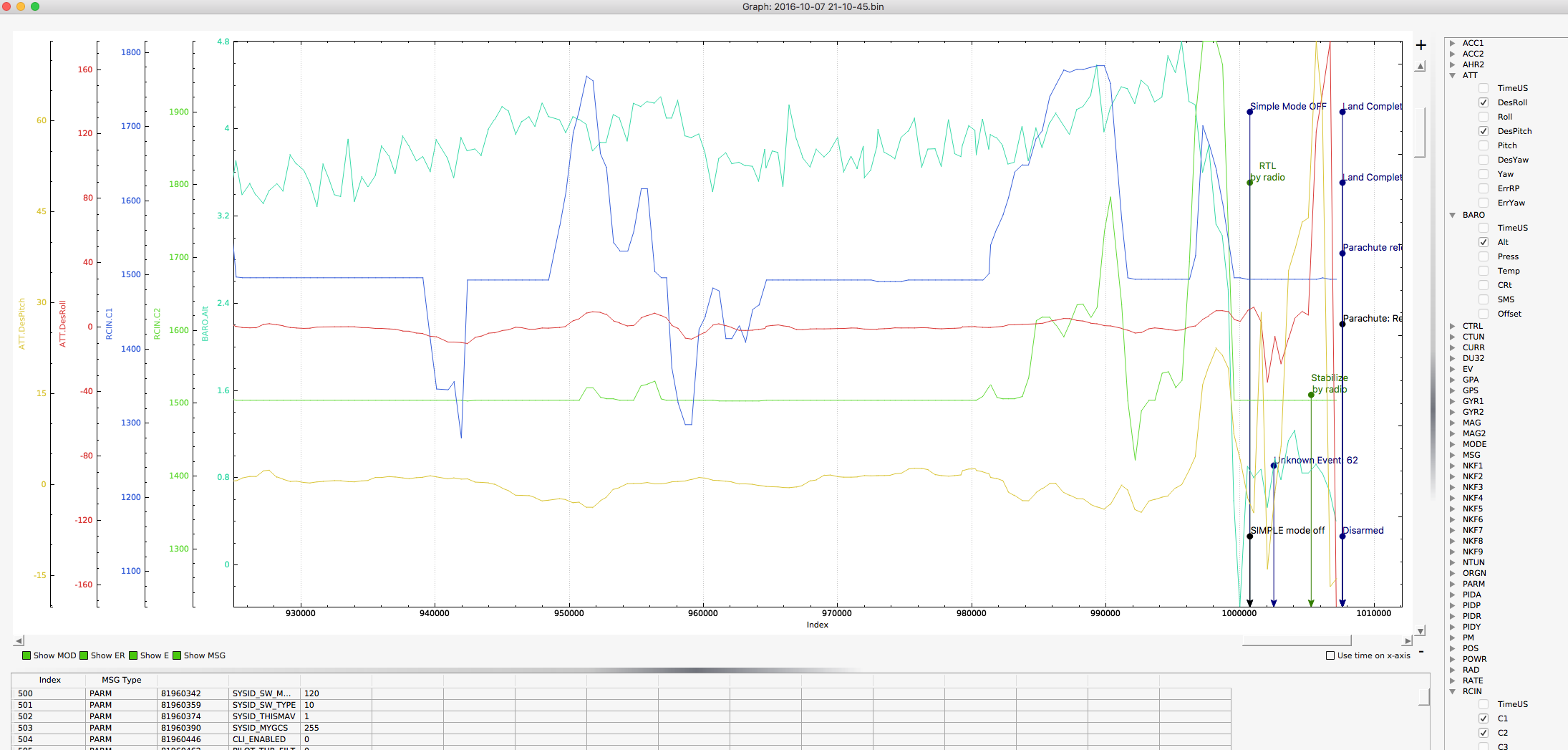
Just before the Alt dropped to zero I see the throttle go to zero and pitch and roll inputs go to max.
The other curious thing is that your DesRoll and DesPitch does not track your RCin.
Your altitude had already hit zero (ground) shortly before RTL was selected
that is the main problem. desroll and despitch not following. Copter accelerated forward before those maneuvers. Switching to RTL was the crucial factor. Trying to lower vibrations for the moment and do a compassmot. Do you have any recommendations ?
the vehicle tune is pretty ok as well (comparing DesRoll vs Roll, DesPitch vs Pitch). The rate PIDs are perhaps just a bit high (maybe reduce rate roll and rate pitch P and I by 20%).
the current spike and voltage drop is very obvious and large as Mike says. Vibration levels spike at the same time as well. Also the estimated climb rate suddenly jumps up. This is happening as the vehicle is falling at 3m/s just before it’s switched into RTL. It looks like the vehicle rolls back and left so it could be a mechanical issue but I’m actually not sure.
Will be good to know what was the cause for that climb,
After further testing and changes vibrations were reduced a lot.
Still, power.vcc in the logs show variance of less than 0.06v while auto analysis reported “Test: VCC = WARN - VCC min/max diff 2.07227v, should be <0.3v”