As the tittle describes, with the same hex frame and mechanical configuration, when it carried 20 L of water, the first harmonic notch was at 40Hz (after doing the AltHold test) but the first harmonic was 30Hz at empty tank.
I wonder if this “Dynamic Notch Filter” could solve this problem? https://ardupilot.org/copter/docs/common-imu-fft.html
Thanks,
Vu.
thanks for letting me know but sorry to ask: what does “getting close to control range…” mean? Is it a serious problem? I am uploading these logs soon.
The gyros need to be responsive in the range approaching 30Hz. Attenuating them with a filter at or below this can adversely effect control of the craft.
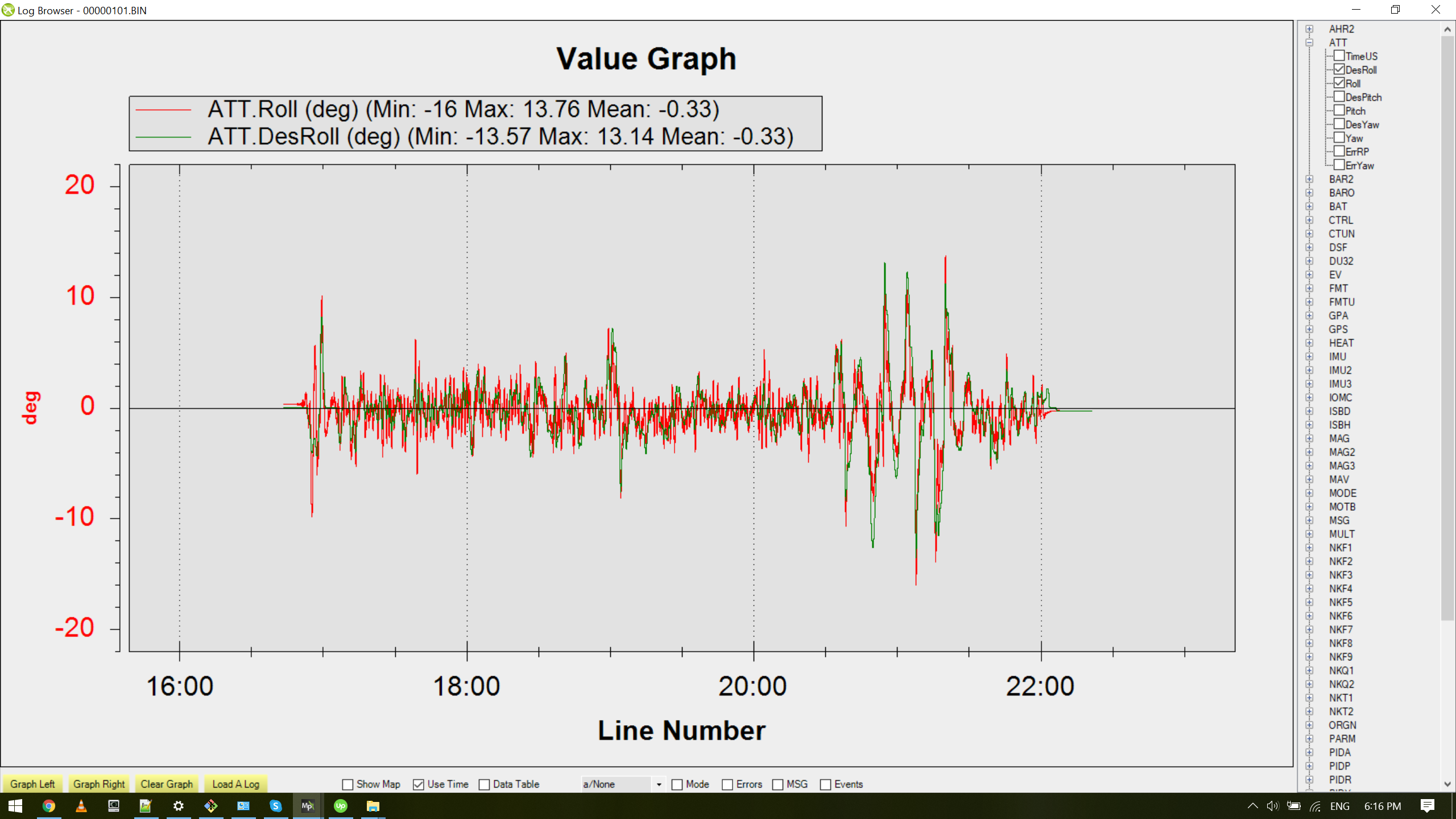
Hello @amilcarlucas and @dkemxr, thanks for your input, it makes me think about the consequences of implementing harmonic notch filter these days. My question is, can we decrease the response of gyros lower than 30Hz to avoid the this risk? I actually faced the crash and reasons were not clearly found. I can just say it is about the “bad tunes”. Here is the log of my AltHold test without payloads
Hello Dave! @dkemxr
Tell me please, if the filter affected the gyroscopes, will it be immediately visible?
How will management problems manifest?
I had a frame resonance at 25Hz on my Octocopter, I set a static marker to this frequency, I immediately saw how the frame vibrations disappeared.
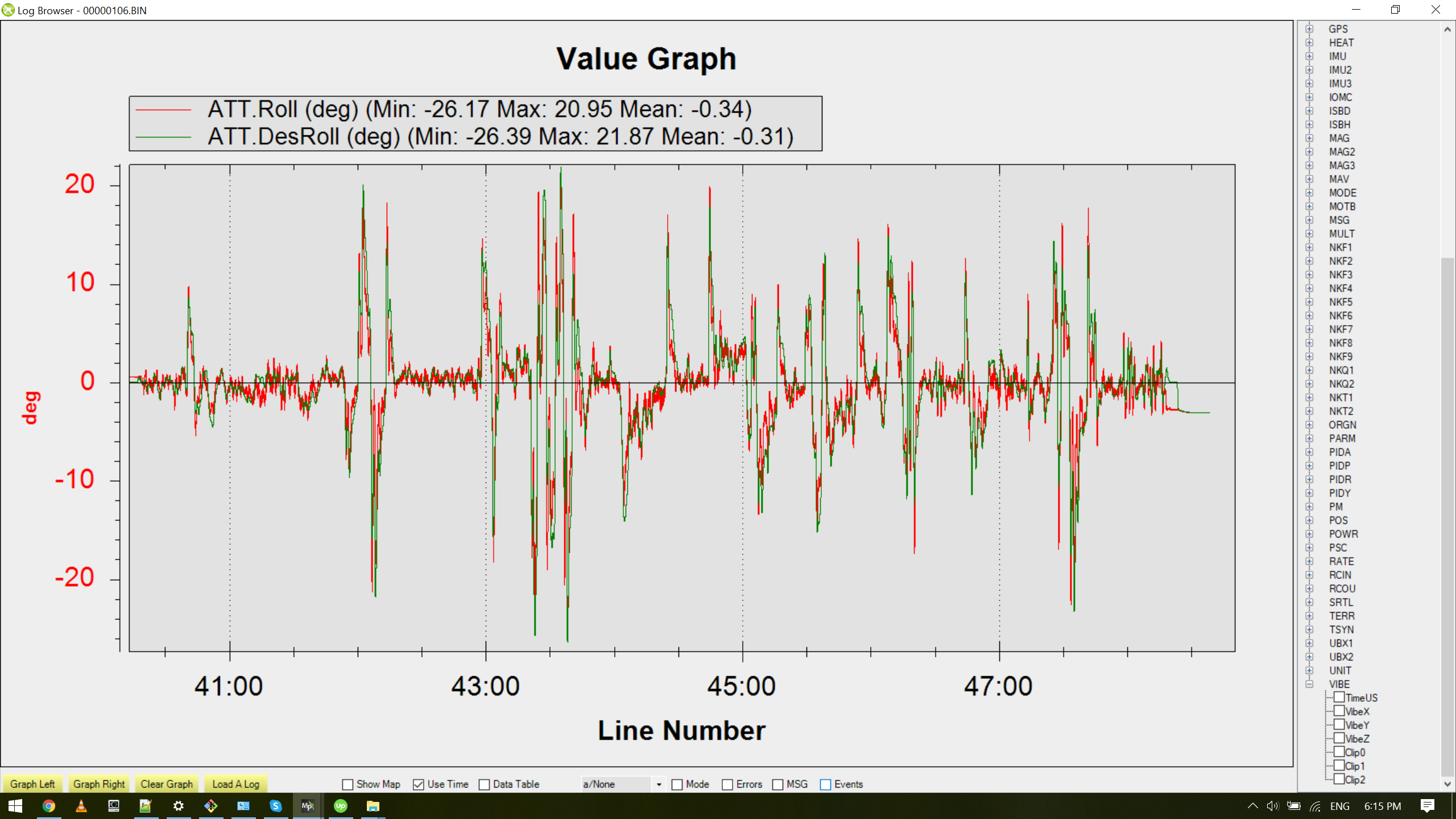
After doing autotuning, and 3 test flights, the drone is controlled well, I did not see any control problems.
So it’s interesting, if the label affected the control control range, would I see it right away?
The large peak w/o payload is at 60Hz not the 40Hz you have the filter freq set to. So change that and the BW to 30Hz. The lower peak is ~27Hz I would leave that alone for now. Also I think your INS_ACCEL_FILTER is too low at 10Hz. Try 15Hz.
So make these changes and make 2 more flights with and w/o payload. Set the INS_LOG_BAT_OPT to 2 so we can see the effect of the filter. It’s possible something will have to be done about the 27Hz mode either with a fixed notch filter or a revised dynamic notch filter configuration.
Yes it is the largest peak at 60Hz without pay load carried. It seems to me this peak is the second harmonic of 30Hz (may be 27Hz). To my memory, the largest peak was around 80Hz with full water tank and in this case, 40Hz is probably 1st harmonic.
I reason why I think 30Hz and 40Hz is my 1st harmonic is because of my calculation on motor RPM and MOT_THST_HOVER:
100KV * 49V * 0.37 (MOT_THST_HOVER) / 60 = 30Hz (approximately)
Does it make sense?
In case we focus on 60Hz, should it be the 1st harmonic?
Yes I will increase the INS_ACCEL_FILTER as you suggest.
Thanks.
That’s quite interesting the difference in modes unloaded to loaded. Perhaps the best choice would be an FFT based Notch. Cube Orange can handle that and it will track the modes live. https://ardupilot.org/copter/docs/common-imu-fft.html
Thanks for your input. Actually I tested with solid payload only but we will consider adding baffles too.
For today testing, by consider 40Hz is my 1st harmonic and 80 Hz is the second one, I observe the little improvement comparing to 30Hz only. Perhaps going to 4.1 for utilizing FFT based notch filter?