I have a little conundrum with my Pixhack v2.81… (this is a testbed for learning and experimenting with ArduPilot based systems… Pixhawk 2 will be on it’s way shortly after initial testing for my day to day rig)
When I load the Quad X firmware (I’ve tried 3.4.5 as well as 3.3.1 now) Motor #4 won’t spin up on arm or during motor test. A, B, and C need to be set at a minimum of 6% to spin up, which is what I expected after reading through the “Setting Motor Range” section of the ardupilot.org site.
There was a list of things to test (Courtesy of TheQuestor, srbell, slimething, and Mr.Jagger on RCGroups forums) which I worked through to determine whether my #4 pin header has a hardware issue or if it is a firmware issue. First I tried the older version of the QuadX firmware, no dice, same behavior. I then took the case apart to see if there was a hardware issue, but everything looked perfectly fine to me. I then put everything back together, hooked everything back up and loaded the 3.4.5 OctoX firmware. I left the four motors wired on pins 1, 2, 3, 4 as a quad and tried the motor test (as was suggested in the other forum). All 4 motors run up at adjusted 8% test throttle. disconnected from MP and armed the copter, all was as it should be (expect that I had OctoX firmware loaded on a Quad setup).
After this success, I reloaded the QuadX 3.4.5 firmware and back to square 1 I went. My thought is that since motor D worked in the OctoX firmware that this is not a hardware issue with the Pixhack. (I know it is not a genuine Hawk, but if testing proves out, that will change.)
I have also wiped and formatted the SD (after backing up of course) for a fresh install and received the same results.
QuadX = Motors 1-3 spin up and functions normally… Motor 4, no response
OctoX = All four motor spin up and react function normally
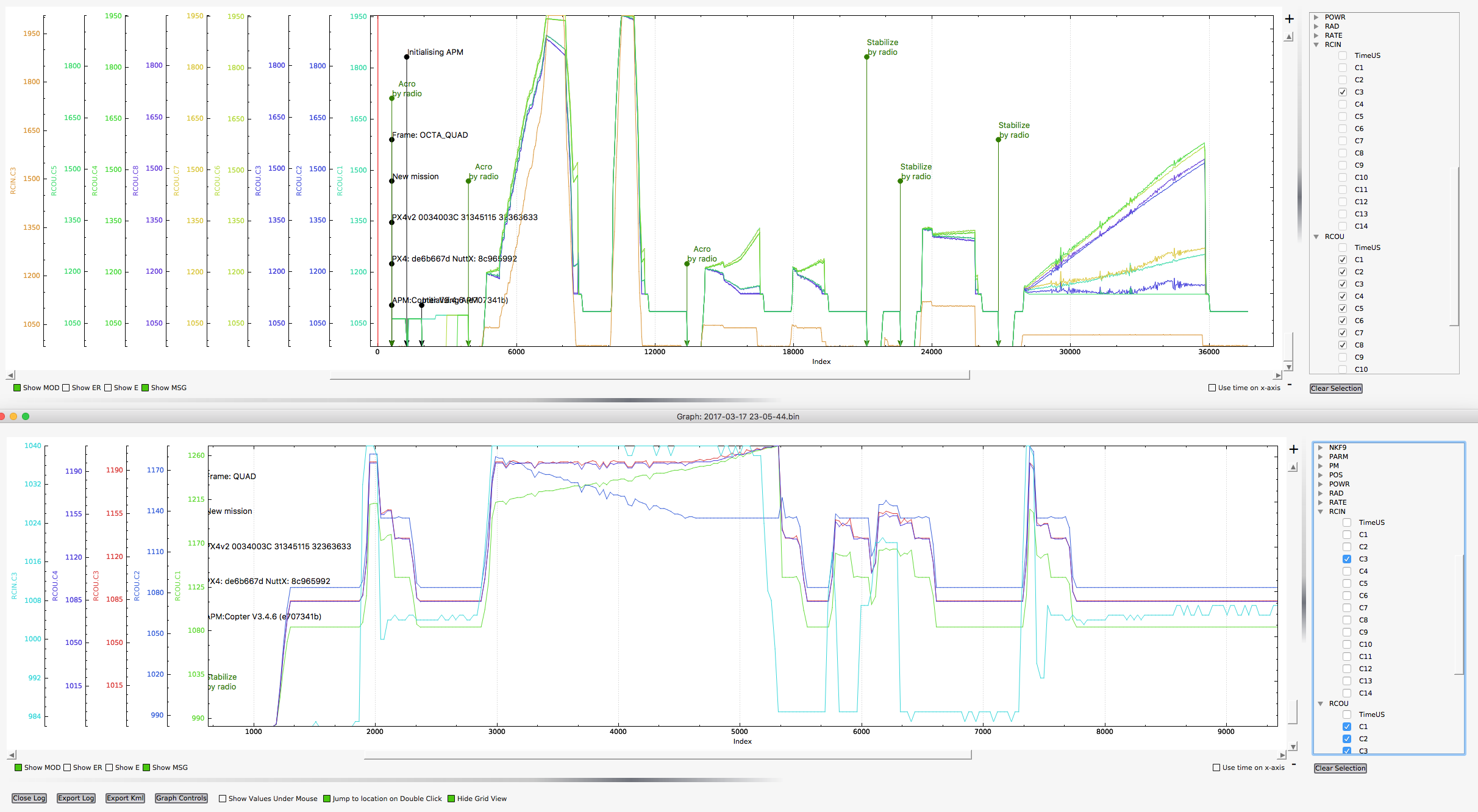
After posting my findings on RCGroups, I was directed here for deeper analysis of the issue, and advised to upload log files of each setup to be analysed (which I have done) none of the parameters seem too far off, as this is my first ArduPilot adventure, I really don’t know how much difference is or isn’t allowed in the PWM settings) If I could get some guidance on where to look and what possible configuration and/or wiring changes may need to be made, I would be greatly appreciative! If pictures of anything in particular will help anyone, I will be happy to upload them if you let me know what you want to see. Sorry for the coffee table book I just wrote, but I like to attempt resolving problems myself based on other’s similar issues before I add to a thread, and to provide as much information the first time around so there isn’t so much back and forth for everyone to read through.
2017-03-13 20-02-31.zip (2.7 MB)2017-03-13 22-39-12.zip (856.8 KB)
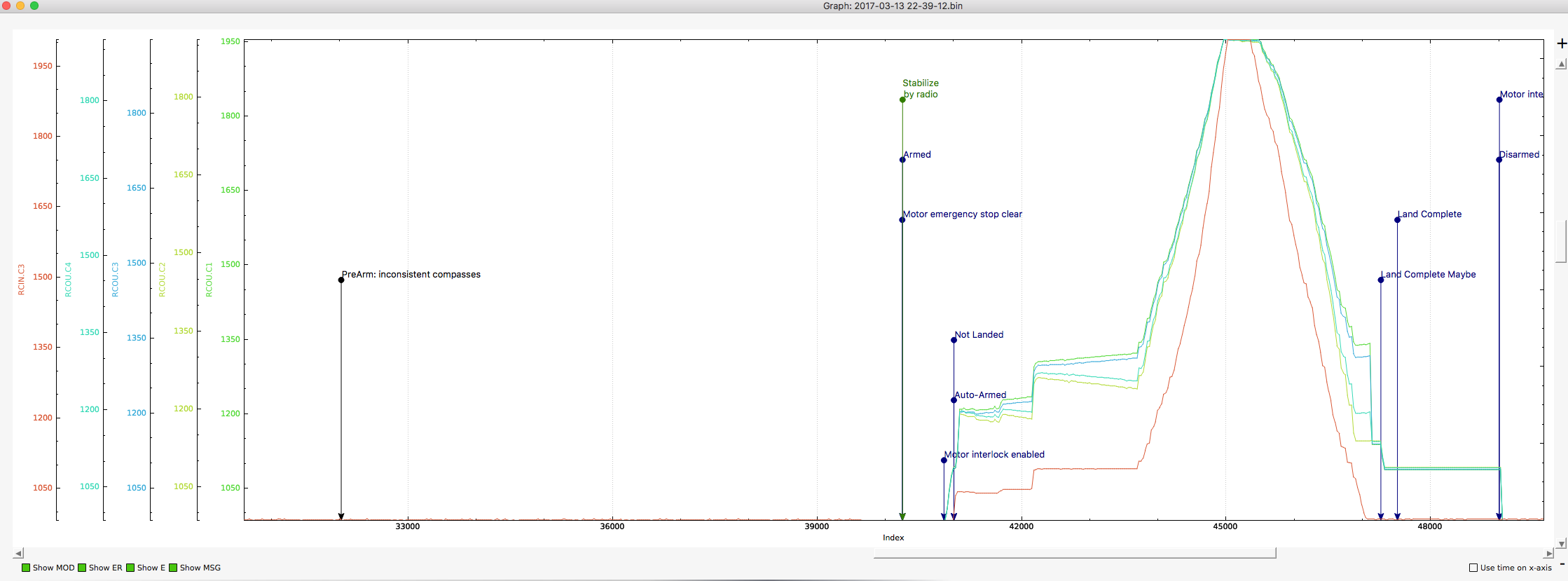
 I’ll start combing through the logs tomorrow to see if I can tell what the difference in the RC out signal is between the two firmwares. I don’t even know where to start asking about whether one motor output is tied to or references another in the coding, or if so, how would it effect the output? Ugh… nuf for tonight.
I’ll start combing through the logs tomorrow to see if I can tell what the difference in the RC out signal is between the two firmwares. I don’t even know where to start asking about whether one motor output is tied to or references another in the coding, or if so, how would it effect the output? Ugh… nuf for tonight.