For the past 6 years, research has been conducted investigating the use of manned rotorcraft handling qualities requirements to aid in the design and improvement of flying/handling qualities for unmanned aircraft. The manned specification is two fold in that it uses predictive flying quality metrics to determine how well the aircraft will perform mission maneuvers. Then it has the pilots fly mission-like tasks where they assign it a handling qualities rating. This allows control law designers to verify that the aircraft meets a certain standard, one that has been shown to produce good handling qualities.
The proposed handling/automation qualities evaluation framework for unmanned aircraft has taken on the same approach and uses the manned criteria already proven to work. Since the manned specification was designed for full scale aircraft, the unmanned evaluation framework had to be scalable to allow evaluation of aircraft of all sizes. Therefore Froude scaling is used to scale UAS test results to full scale to compare to accepted criteria from the manned specification. Similar to designing control laws for manned aircraft, this enables control law designers for unmanned aircraft to ensure their aircraft meet the standards that have been shown to produce good flying/handling qualities.
Previous research has shown the importance of ensuring the UAS basic stabilization meets certain criteria. For the Ardupilot community this mean that the rate and attitude controller have been tuned well. This can be verified by conducting frequency sweeps using the System ID mode to determine the attitude bandwidth and disturbance rejection bandwidth. Our most recent work investigated the importance of the outer loop criteria. This looks at ways to ensure the position controller is tuned well. This research determined that position and velocity disturbance rejection bandwidth along with tracking bandwidth play an important role in determining the quality of the velocity/position control. The system ID mode was modified to allow the conduct of frequency sweeps at the position controller level to determine these criteria. Position Controller System ID PR
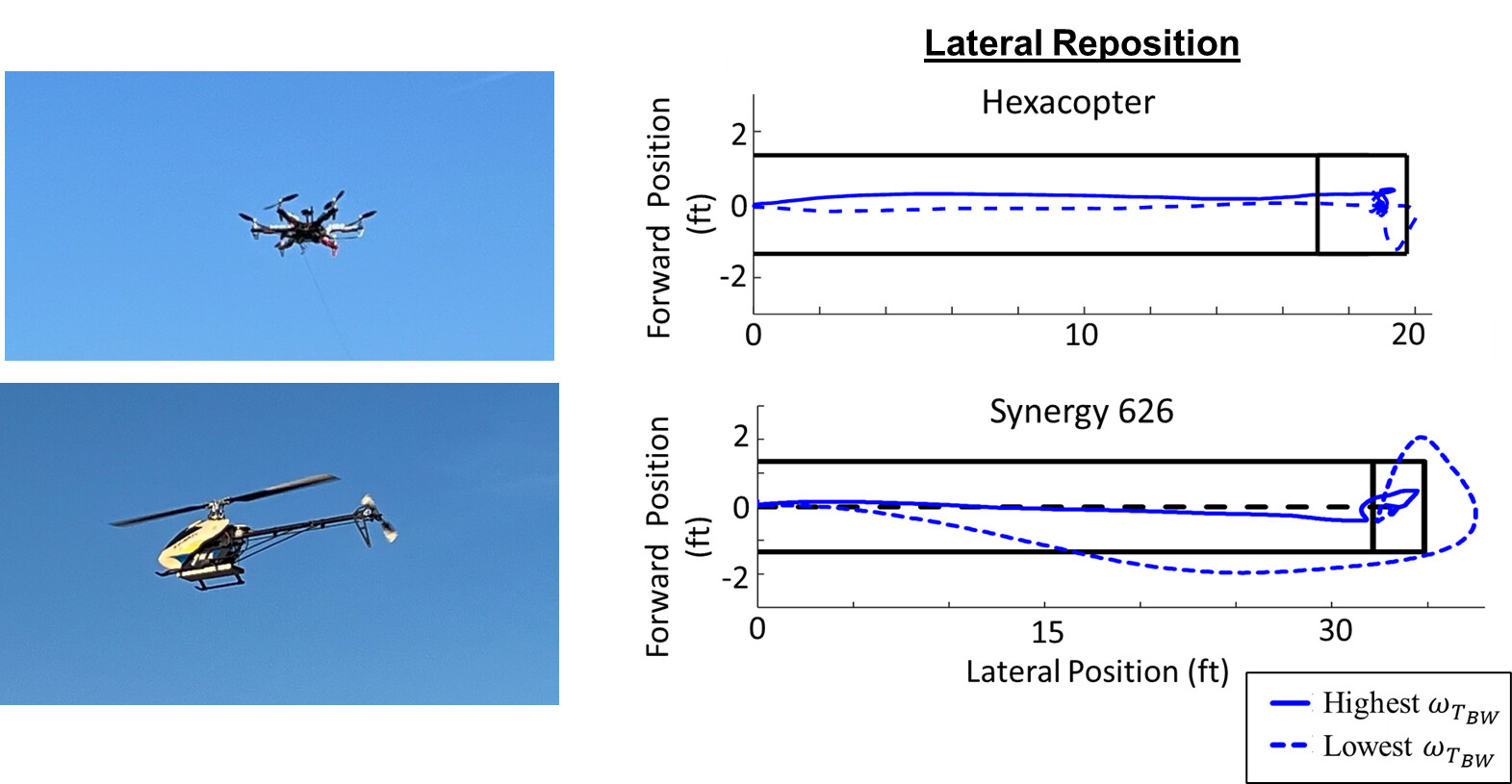
Finally, similar to the manned specification, mission-like tasks can be flown by the UAS and rated to verify that the UAS meets the needs for a particular mission. This part of the research is still somewhat in the early stages as there are probably many mission tasks that still need to be defined to be able to demonstrate that the UAS is capable of performing the mission. Certainly many of the manned tasks like hovering, hovering turn, lateral reposition and depart abort can be scaled and used but there are others that need to be developed that are better suited to evaluating UAS mission like tasks.
Here is the paper that was most recently published. I have also linked the work in this wiki page