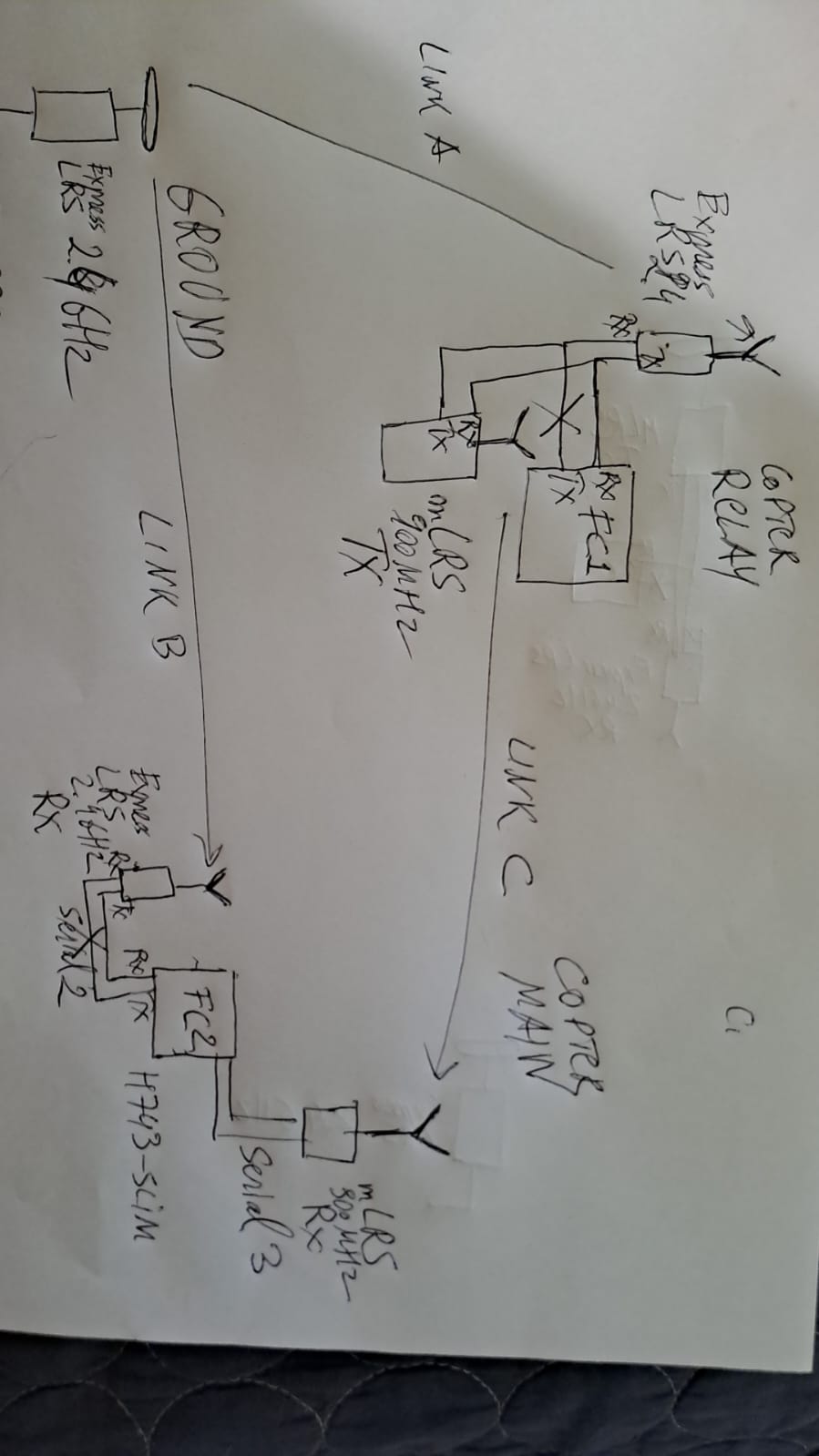
As can be seen, there are three links A, B, C
Now the questions/issues:
In operation state 1, all three links are active, Copter RELAY is controlled through Link A
Copter MAIN is controlled through Link B, and is retransmitting through Link C, but the RC signal is ignored while Link B is active.
In operation state 2, Link B is lost (cut off) due to signal loss. The idea here is that Copter MAIN now would operate through Link C, the control signal for which is retransmitted through Link B.
Would it work as intended, would there be any issues for switch over, both for LINK B being cut off and restored? Would it work without any scripts, just by connecting as indicated?
Also, a very big issue is this:
In operation state 2, if link A is lost, but link C continues, and Link B is also down, would that generate a RC failsafe on the MAIN Copter? If both links B and C are lost, from my understanding, we will definitively have a RC failsafe on MAIN. However, if LINK C persists with empty transmission because Link A was cut, I am not sure if that would generate a failsafe. This is extremely important, because it could lead to loss of control of the MAIN Copter which would not know that the signal was lost (I dto not have deep understanding of how LRS receivers work).
Also, I see a lot of issues for the telemetry/mavlink data… I think that for operation mode 2 (Link A and Link C active, link B down), the mavlink connection to MAIN copter should be working.
If Link B is active, then RC signal would go through Link B, but I am not sure whether the Mavlink would continue to operate through Link C<>Link A.
Before I start experimenting, and this does not seem that trivial,
Any input on the idea?