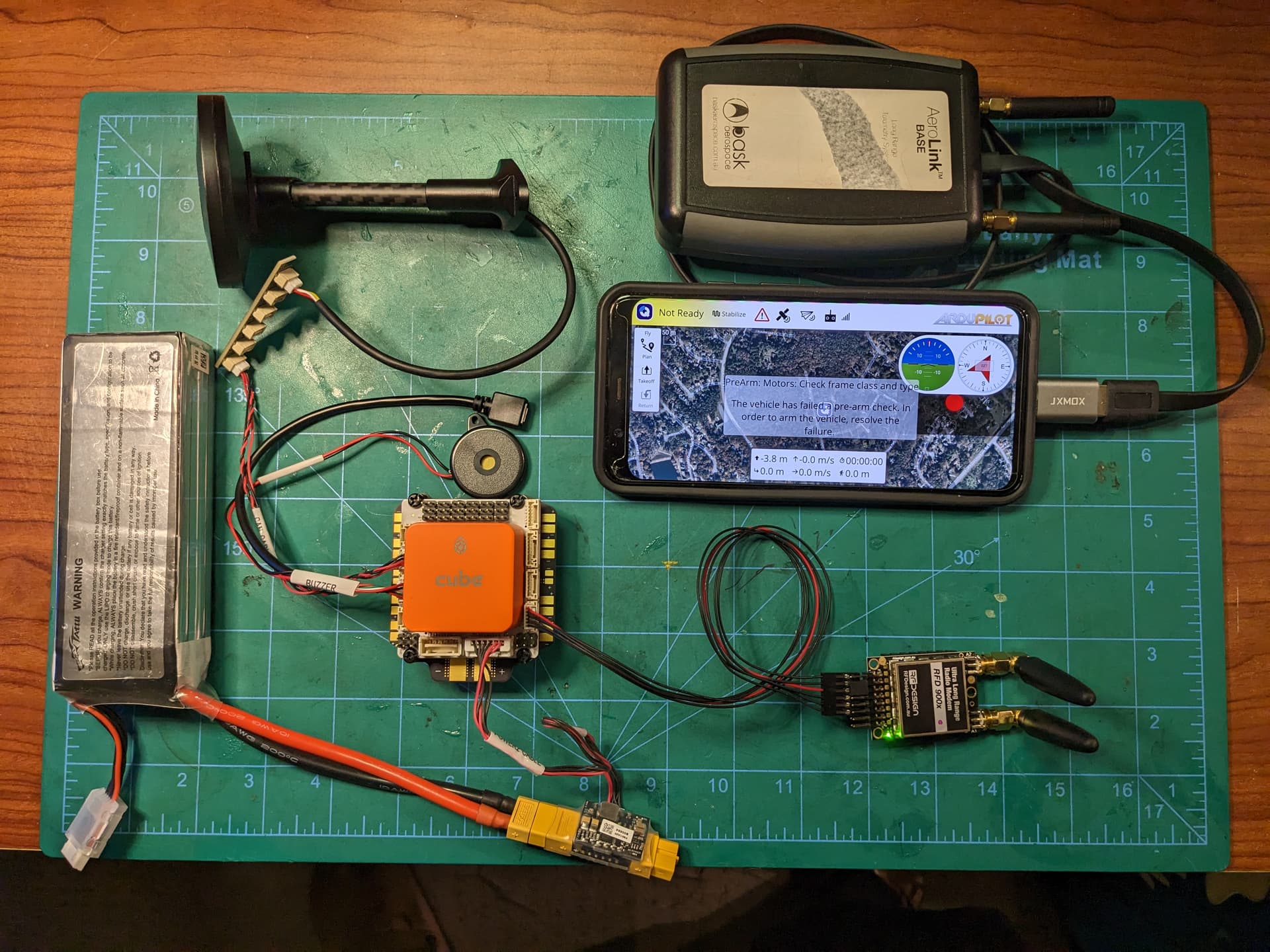
I’m going to use RFD900’s as my radio - both as telemetry as my control.
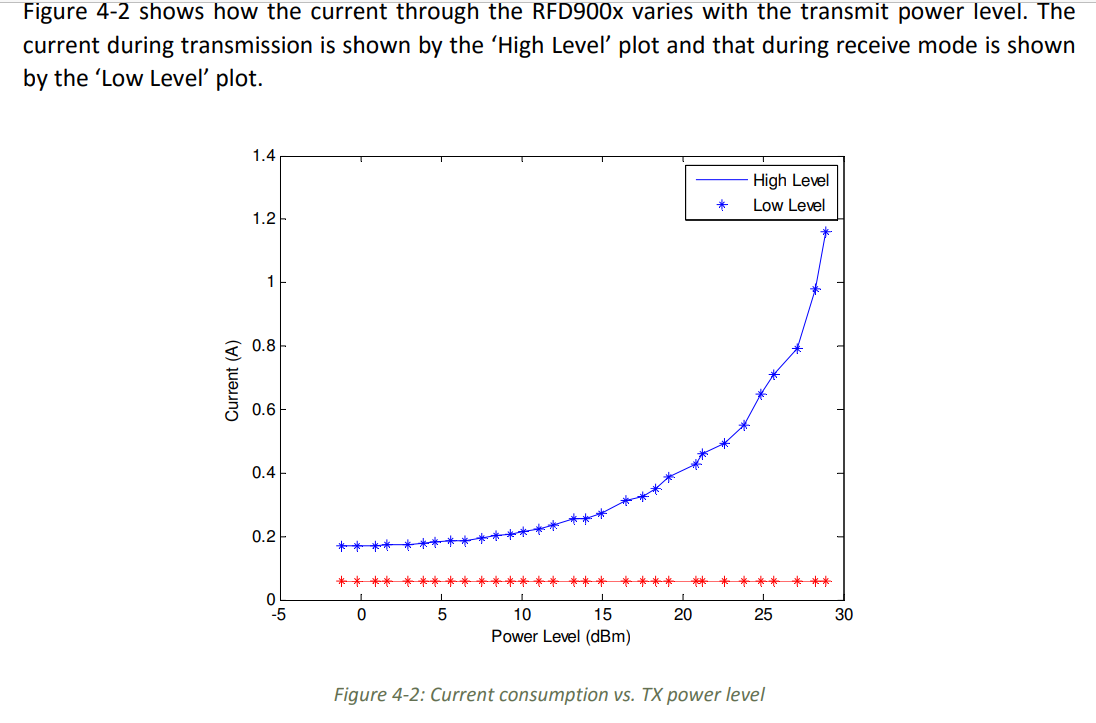
Sharing about this on the CubePilot facebook group, this brought up the issue of using the 5V power on the Telem-1 port. I knew that this was a potential issue, but expected it could be mitigated by keeping the RFD900 output to a low level. RFDesigns has this chart in the RFD900 datasheet:
There are other SiK radios such as the Holybro SiK Telemetry Radio V3 that are designed to be powered through the Pixhawk Telem-1 port. It does however how a low 300mW output.
I’d really like to have a better understanding of what the issues are and it’s history. For example, why is there power on the Telem-1 at all if using it is as problematic as CubePilot representatives say it is? Is there a similar issue with using the 3V on the SPKT port? Is this a design flaw in the pixhawk design, or something specific to certain products. (For example, I think the IMU issue addressed by the latest stable firmware is specific to Cube autopilots.)
Any supplemental information on this issue would be greatly appreciated. I know it’s been a topic of debate for many years. I couldn’t find anything about it in the CubePilot wiki docs, so I’m really curious why there’s not more definitive information available about it.
I have run a RFD900X off the Telem-1 port of a Cube Orange, however I did reduce the power as was suggested. It worked, nothing caught fire. But of course you don’t have all the range and penetration that the RFD900X is capable of. My setup was for a test platform, not a long-term flyer so I don’t know if there was any other implications.
All that said, I would still suggest using a separate power source for the RFD radios that way you never have to worry about it. Castle makes a really small BEC that works great for this. CCBEC 10A PEAK 25V MAX INPUT SBEC
The goal of this particular project for me is to see how inexpensively an ArduPilot quad-copter can be built. I got my start on Hexsoon EDU-450 kits. But I’ve recently been thinking about the Holybro X500-V2 kit - which looks a lot easier. Ian (MadTech) posted a YouTube video on his channel using a Holybro Pixhawk flight controller using the pre-installed PX4. I wanted to put something out there with an Orange Cube and ArduPilot.
Ideally, I’d like to have a platform that a high-school class could afford as a student project.
I’d really like to build this thing with my HereLink - but as a new Air Unit costs $500, it doesn’t make sense. The SiYI MK15 also costs $500 - but it it includes both Air and Ground units - and a camera. I might go that route for phase two.
I have some friends at iVue Robotics (www.vuerobotics.com) that sell their custom quad copters using PixHawk flight controllers and Holybro SiK radios - and control the drones with laptops and gamepad joysticks. It’s cheap and effective. I though I’d take it a step further by using QGC on an Android phone and a bluetooth connected gamepad with joysticks. And since I have a bunch of RFD900x’s on my shelf, I thought I’d use them.
Sorry for the digression…
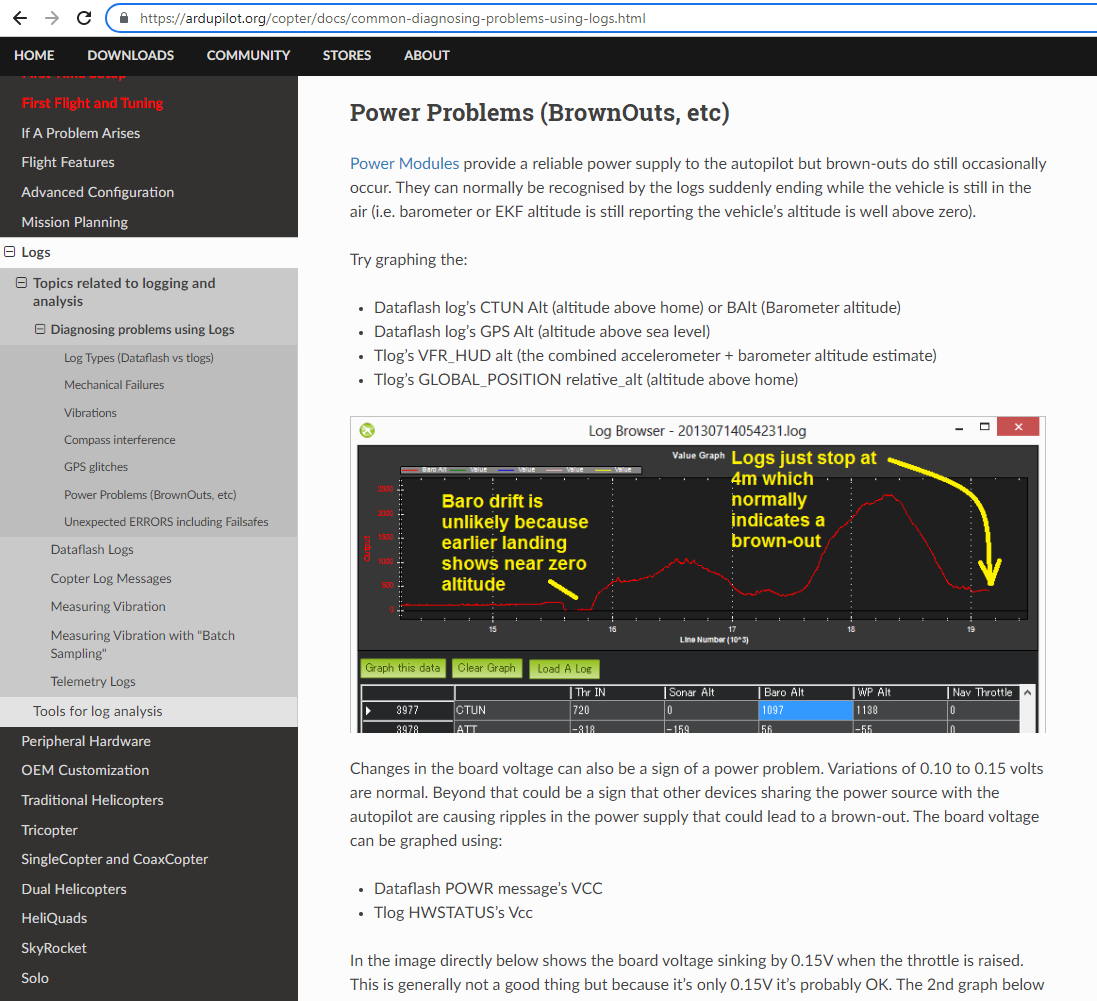
What I really want to know is what’s going on under the hood regarding the power on the Telem-1 and SPKT ports. It’s easy enough to monitor POWR.VCC to verify that I’m not at risk of a brown-out, but the folks at CubePilot hint that there’s some other possible adverse effects. I’m just trying to find out what those might be - and if there are mitigation strategies.
Once again - Thanks Allister for sharing your experience and thoughts!
For what you want to do, and given you have the parts already, then I’d say just reduce the power of the RFD900 and go for it. My understand is that the port just isn’t rated for the higher current that the RFD900 can draw at 30db. Might be the size of wire they used, or the traces on the PCB. I don’t know. But at 20db, you’re going to be drawing the same as a SiK radio and that should be fine.
The SPKT ports are left overs from the good 'ol days when Spektrum radios were popular. They used 3v power and were often rated at very low current. I’d just ignore that unless you have some old Spektrum satellite RXs collecting dust on your shelf.
One thing to remember about flying using a game pad/joystick, is that it’s not recommended for initial tuning and setup flights. If the game pad is connected bluetooth to the phone and then to the quad, the latency will be too high for those initial stabilized setup flights. You might want to use a regular RC to get the quad up and flying (if it isn’t tuned already) and then switch it over to the game pad.