I want to add a downward facing LIDAR rangefinder to my VTOL quadplane in order to be able to hold altitude more precisely while hovering near the ground, so I decided to read the ArduPlane documentation about using LIDAR rangefinders here.
Could I use a LIDAR rangefinder during regular waypoint flights (in vertical flight / hover mode) in my AUTO mission to maintain an accurate altitude (e.g. 5m AGL) ?
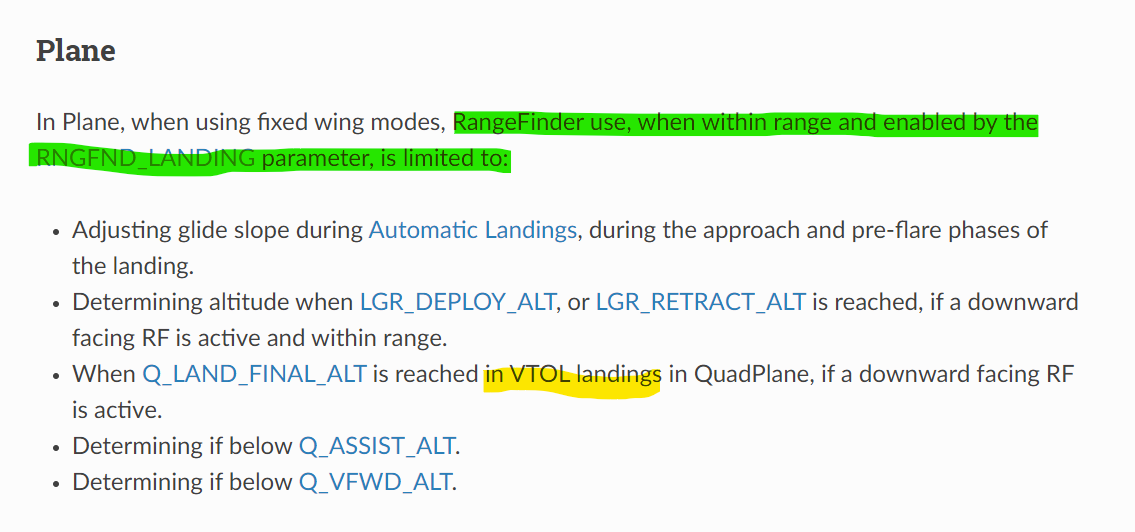
There are a few things here that are unclear to me (highlighted below) which I would really appreciate you clarifying.
Highlighted in green - so is the rangefinder not used throughout the entire AUTO mission?
Yellow highlight 1 - if during part of my AUTO mission the drone is hovering at an altitude that is below Q_LAND_FINAL_ALT but not performing a Q_RTL or VTOL_LAND (just hovering) then would the rangefinder not be used?
I am asking these questions as my ideal use case for the LIDAR rangefinder would be precisely holding altitude while hovering at 2-10m AGL, and the reason I’d like to use the rangefinder is because terrain maps are not very accurate where I’m flying.
I’ve just discussed some of this information with an experienced UAV pilot friend of mine. According to him, the LIDAR rangefinder is always used for altitude IF it is in range and the quadplane is in VTOL mode (not fixed-wing mode). |
Can someone please confirm this for me (ideally from experience or with reference to the documentation)? Thanks!
@Jan_Kryca the lidar is logged and made available to the pilot via telemetry all the time, but it is only used for control of the aircraft in a narrow range of circumstances.
The main use on a quadplane is for landing if RNGFND_LANDING is set to 1. In that case it is used to determine the height at which we switch from the LAND_DESCEND to the LAND_FINAL phase of the VTOL landing (ie. when we slow down).
Other places it is used are:
in the forward throttle logic for keeping the plane level in wind when weathervaning, we use rangefinder height (if available) to stop the forward motor at Q_VFWD_ALT
in the weathervaning code to determine height for Q_WVANE_HGT_MIN
It is possible to configure EKF3 to use rangefinder for height estimation but it is strongly discouraged. There are very few circumstances in which it is a good idea.
Thank you for the in depth answer (as always of course!) @tridge .
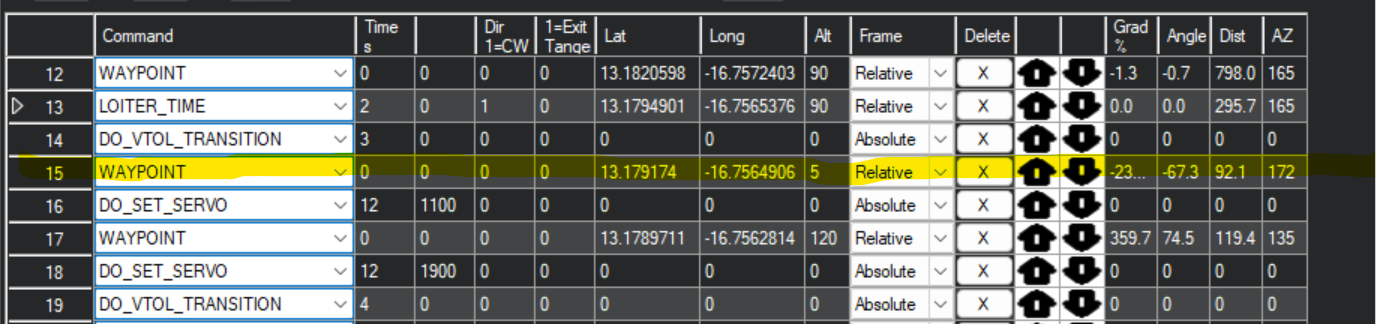
In our particular use case, we will want to use the LIDAR rangefinder to have an accurate package drop altitude (2m) for our delivery missions. We are using a quadplane. I took as screenshot from MP of our mission below.
Would the LIDAR rangefinder altitude be used by the autopilot by default for the highlighted waypoint?(this is the waypoint at which the cargo box is opened and the package is released)
@Kofi_Yeboah_Koranten , tagging you in here Kofi in case you’ve got experience with LIDAR use on quadplanes from your work with the VTOL last month, and maybe also @Yuri_Rage in case you’ve done some LIDAR work! Would appreciate any input!
Sorry for the late response.
I was away for a while, I have worked with one lidar rangefinder, for an octacopter not the VTOL.
I would be building one VTOL soon once that one is ready I can get lidar sensor on board so we run some tests on that one.
If that would be fine with you.