Hi,
I’ve tried connecting the sonar according to the instructions in this page, with no success. The pixhawk don’t show any reading of distance in the “sonarrange” field.
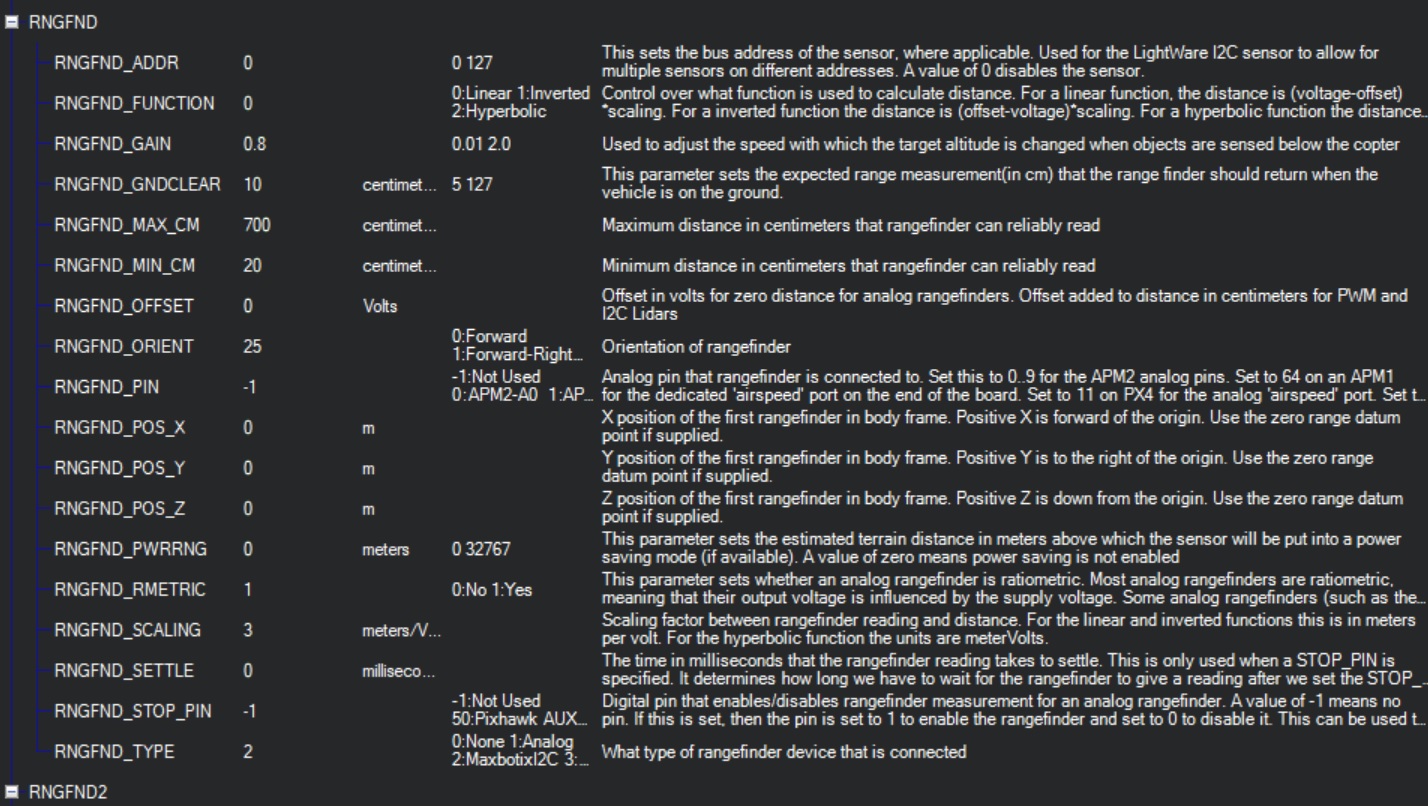
It crossed my mind that in the instructions they only configure two parameters, and leave the sensor address to be zero. Maybe some address should be defined in the RNGFND_ADDR ?
any other suggestions?
Attached is a screen shot of the range finder parameters.
thanks!