However, the telemetry link from ant tracker to mavproxy now contains 2 mavlink sources (1drone+1ant tracker). Mavproxy seems to switch between both of them, spamming my screen and making it unusable. The command i use is mavproxy.py --master=COM3 --out=udp:127.0.0.1
How can i “discard” the ant tracker mavlink messages? I just need mavlink from the drone within mavproxy.
Possible solution:
I can run 1 usb to drone radio and 1 usb to ant tracker pixhawk. Then i call mavproxy to connect to the drone radio and forward it via antenna tracker module to the pixhawk, Like this
drone — radio —> mavproxy ----> usb ----> ant tracker
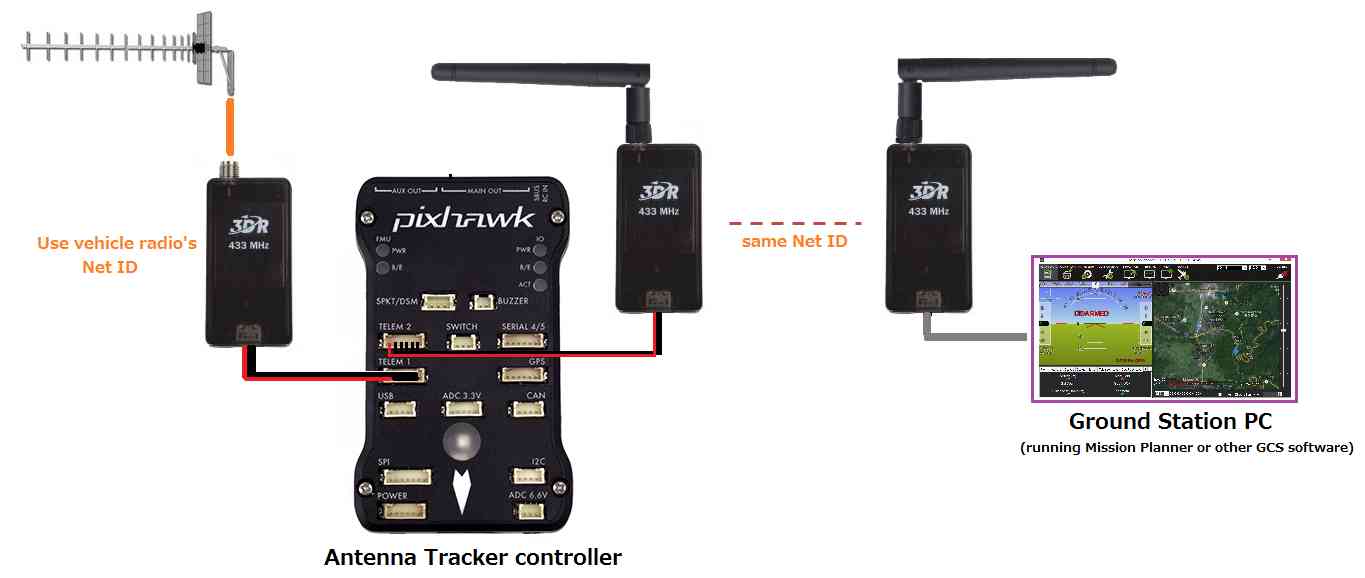
However, I wish to use a true wireless setup which operates with mavproxy (as opposed to MP) like that setup i linked. Is that possible?
You’ll need MAVProxy to act as a distributor of MAVlink packets, filtered by the SYSID_THISMAV.
Use the output add sysid X 127.0.0.1:16000 and output add sysid Y 127.0.0.1:16100 in the MAVProxy console. This will tell MAVProxy to output filtered streams, where X and Y are the SYSID_THISMAV of each vehicle.
Then start up an instance on MAVProxy for each vehicle required, ie. mavproxy.py --master=127.0.0.1:16000 and mavproxy.py --master=127.0.0.1:16100
So if i understand correctly, there will be 3 mavproxy running?
1x Mavproxy (acting as a distributor)
2x Mavproxy (connecting to drone/ant tracker stream originating from distributor?)
Although I’m not an expert in mavproxy source code, if you can point me in the correct direction/section to implement this feature, I’ll be happy to attempt.
As far as I can see, it should reside in process_master function call? Something along the lines of
if (SYSID_THIS_MAV == source_system) process() else discard()
Hey, was there any progress made on this? I would like to implement the filtering feature but am a bit lost as to where I am to input the filtering information.
{kind=link}