Can I run STIL on a RasPi3? Does it have enough power for it?
Sure, there’s even ready-to-go images that do it:
https://fnoop.github.io/maverick/#/?id=installation
Nice!! I’ll look at that tonight! Thanks!
Sorry new location is:
https://goodrobots.github.io/maverick
I can’t work out how to add a redirect, I’ll try again!
Update: I think I’ve worked out how to add the new links to the old location.
1 Like
So I got around to doing this, easier than I thought it would be. I loaded the image onto the micro SD card, fired it up, and checked to see it STIL was running, and it was, connected to it with Mission Planner, then flew the simulated quad around some airfield, even set up a waypoint mission, loaded it and ran it. Very Cool!!!
Now I just have to figure out how to change to Plane and fly that around.
Also need to find a way to change the default location so I can fly around my location.
Cool!
To change to plane takes a bit of effort as the SITL firmware has to be recompiled. Docs are here:
http://goodrobots.github.io/maverick/#/modules/dev?id=ardupilot-firmware
Basically, add a localconf parameter:
"maverick_dev::ardupilot::ardupilot_vehicle": "plane"
Then reconfigure:
maverick configure
Warning, this will take a while on a raspberry! Been a long time since I tested this, hopefully it still works.
I might give it a shot tonight, then just let it run all night, will update either way.
I tried, but got an error. What file, and where is it, that needs to be edited.
Also I wanted to change the start up location of STIL, and found the directions for SITL installed “normally” but where is the location file when Maverick installs it.
p.s. Very cool, SITL just works! connect via TCP and it works. Now to get my tracker to follow it.
http://goodrobots.github.io/maverick/#/about?id=local-configuration
So anywhere in the docs that refer to ‘localconf parameter’, it means ~/config/maverick/localconf.json
So theoretically it should be in ~/config/dev/sitl.conf. I say theoretically because I’m not sure I’ve ever actually tested it!
http://goodrobots.github.io/maverick/#/modules/dev?id=sitl
OK,
So I am able to change my start up location to what ever I want, but the “locations.txt” file is at “~/code/ardupilot/Tools/autotest/locations.txt”, no big deal.
Changing to Arduplane is still not working for me. I added the line “maverick_dev::ardupilot::ardupilot_vehicle”: “plane” and I get an error, see attached image
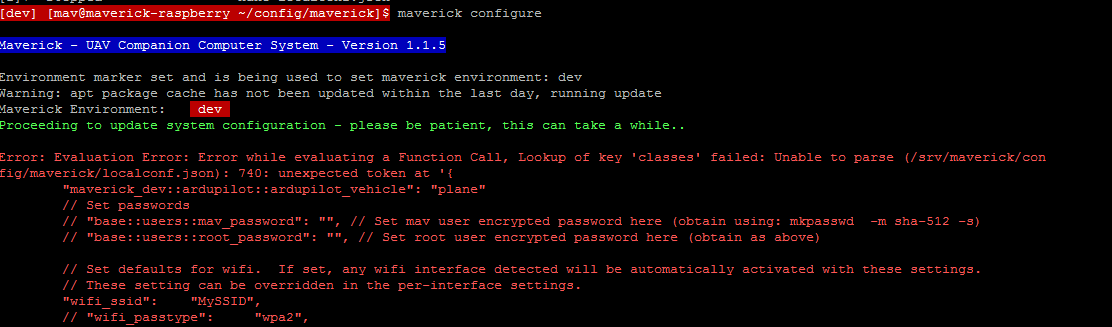
As you can see, I put the line right after the { , but I think that is the wrong spot.
Rusty
Out of interest, did you try changing ~/config/dev/sitl.conf?
Ah, no that’s right but you need to put a comma at the end of the line. json is quite unforgiving…
I first tried changing the “Quad” to “Plane” in ~/config/dev/sitl.conf But either it didn’t work or it crashed out. I’ll try again tonight and report better.
As far as the json file… Yeah, bit of a newbee with that, and I missed that part about the comma…  I’ll try tonight again…
I’ll try tonight again…
Sorry, I meant changing LOCATION or CUSTOM_LOCATION in ~/config/dev/sitl.conf
Yes this needs to match whatever you set in ‘maverick_dev::ardupilot::ardupilot_vehicle’. Unfortunately after setting that localconf parameter you have to recompile the firmware with maverick configure, then restarting SITL should work (theoretically).
OK, so I added the comma, and it ran mostly ok. There were some dependencies that were not resolved, but it looks like it changed the vehicle to ‘plane’ I connected with MP and saw a plane  However MP mow says it needs 3D accel calibration.
However MP mow says it needs 3D accel calibration.
Part 2
Ok, so I loaded Maverick on a RasPi Zero W, took a little work to find the IP address once it fired up, but I found it. (that is not a Maverick issue, but a RasPi zero W issue), but what configuring do I have to do to use it in flight as opposed to one being used as a GS??
OK little update,
Got Maverick running now on a Raspi 3, and SITL is running. I can connect via TCP to the simulated copter and set a mission and have it fly it. Now what I need to do is have the MAVLink packets sent via a USB telemetry radio from the SITL to my Antenna Tracker that i am working on. How do I configure it to send MAVlink packets on tty/USB0 (the telemetry radio). With plain MAVProxy I think I would use “mavproxy.py --master=/dev/ttyUSB0” but not sure how in Maverick…
When you login over the command line, it should tell you your IP address, eg:
** Maverick UAV Companion Computer **
System Type: Virtual Machine (VM)
VM Hypervisor: kvm
Processors: 1
Memory Size: 1.95 GB
----------------------------------
OS: Ubuntu
OS Version: 16.04
Architecture: amd64
Kernel: 4.4.0-112-generic
Timezone: GMT
FQDN: www.my.drone
**IP Address: 46.xxx.xxx.xxx**
Or you can do maverick netinfo which will give you detailed info about each network interface.
To use it for flight, I would recommend putting it in ‘flight’ mode, which turns off the dev services including all the SITL and associated ROS stuff:
maverick configure --env=flight
To turn it back into dev mode with all the SITL services:
maverick configure --env=dev
If you want to send mavlink packets back out, to broadcast over your radio, rather than receive from the radio, that’s not currently supported (and I don’t think that’s what the mavproxy master option is for either). It’s a good idea though, if you raise a github issue (Issues · goodrobots/maverick · GitHub) I’ll be happy to add the option.
Ok, i opened an issue, #738
Thanks
Rusty