I use 4 in 1 esc for my dual motor tail-sitter beacuse of the calibration accuracy.I use two power out of esc and i checked it with esc telemetry connection to pixhawk.Voltage value for one power out is 11.3.It doesnt enough to fly my tailsitter.
i connect the batery to pdb and it goes to esc.
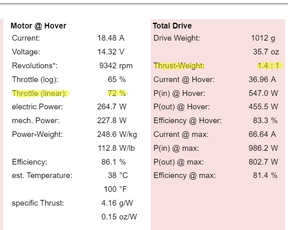
according to datasheet single motor can give us 2200 gr thrust. with dual motor we have 4400 thrust. The plane weight is 2.2kg. let me show you picture of tailsitter
With multi-rotors you want a 2:1 thrust to weight. With a VTOL, particularly a dual motor, that can sometimes be hard to achieve but what you have is too low IMO.
Do you have a .bin log of a take-off attempt? Let’s see what’s actually happening.
we checked the battery and it show us normal value(4s-16.8v). but when we checked our esc telemetry it shows 11.4-11.3 v for both esc1_volt and esc2_volt.
Not sure why you would suspect the ESC as a problem.
No Battery logging.
The throttle goes to 100 and so do the motor outputs so not much to be learned there.
From the photo it looks like the motors are fixed yet you have tilt assignments. Which is it?
Remove the Tilt assignments. Someone with direct 2-motor Tailsitter experience should probably take over from here, I was simply looking at the thrust/weight situation and noticed these servo assignments. My thought is those Elevons will not have the authority required but it’s just a hunch.
We assigned the servo setup as disabled for servo3 and servo4 functions because of the dshot setup.Elevon right and elevon left at servo5 and servo6. we try to put servo 3 and 4 disabled but when we turn off the power and turn on it again they immediately turn to tiltmotor left-right even if we dont put it by ourselves, it turns out like that by itself
We assigned the servo setup as disabled for servo3 and servo4 functions because of the dshot setup.Elevon right and elevon left at servo5 and servo6. we try to put servo 3 and 4 disabled but when we turn off the power and turn on it again they immediately turn to tiltmotor left-right even if we dont put it by ourselves, it turns out like that by itself…