My problem is on pixhawk i need to use one can port (can1 for example) for a canbus interfaced equipment and another can port (can2) for Here3 gnss sensor . Interestingly here3 configuration manual direct to control 2 canbus ports.
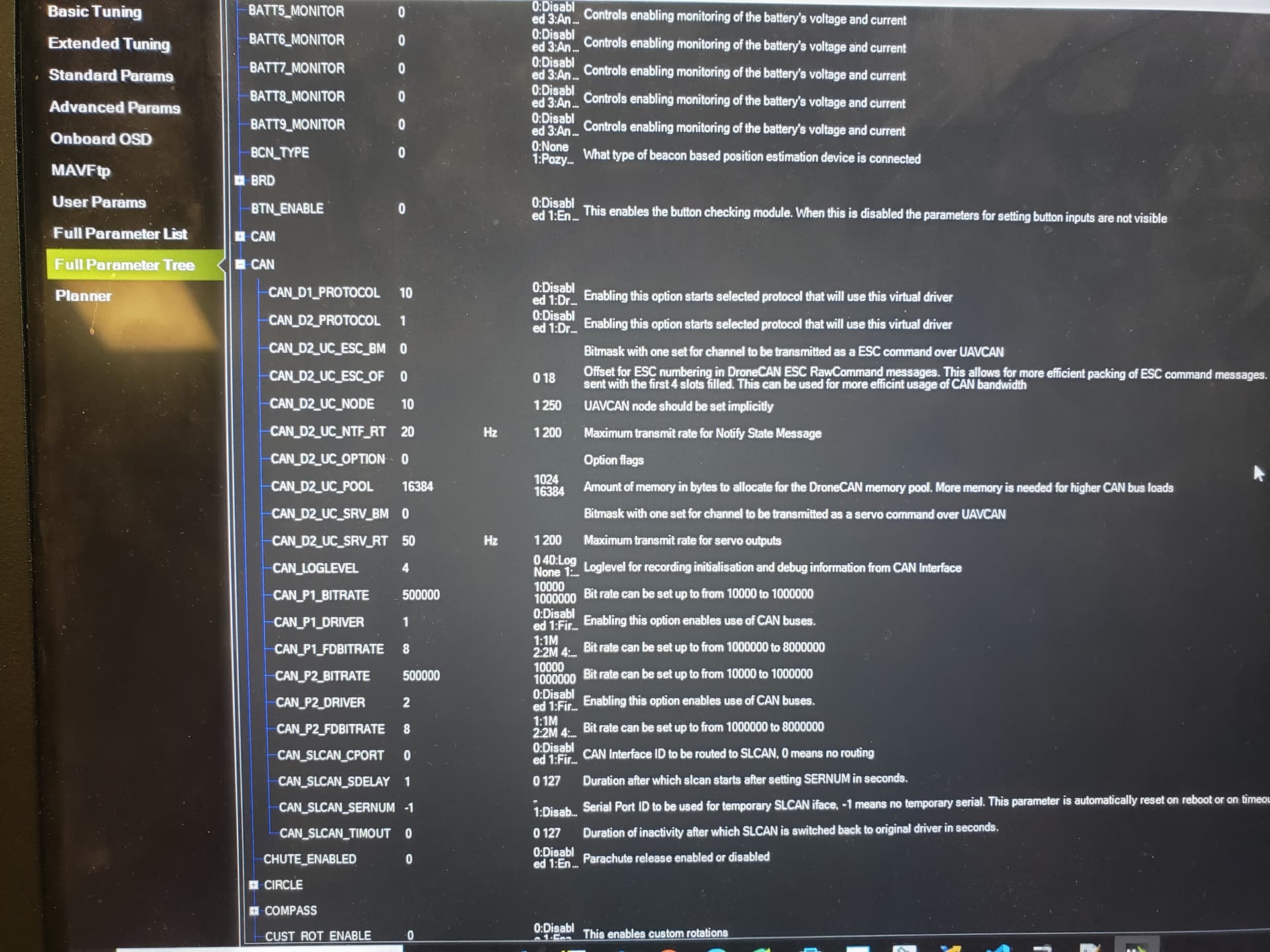
I attached Here3 mission planner necessary parameters and my current config.
I couldn’t run both equipments at the same time instead can run one at a time. So question is can it be done if so how or, it can’t?
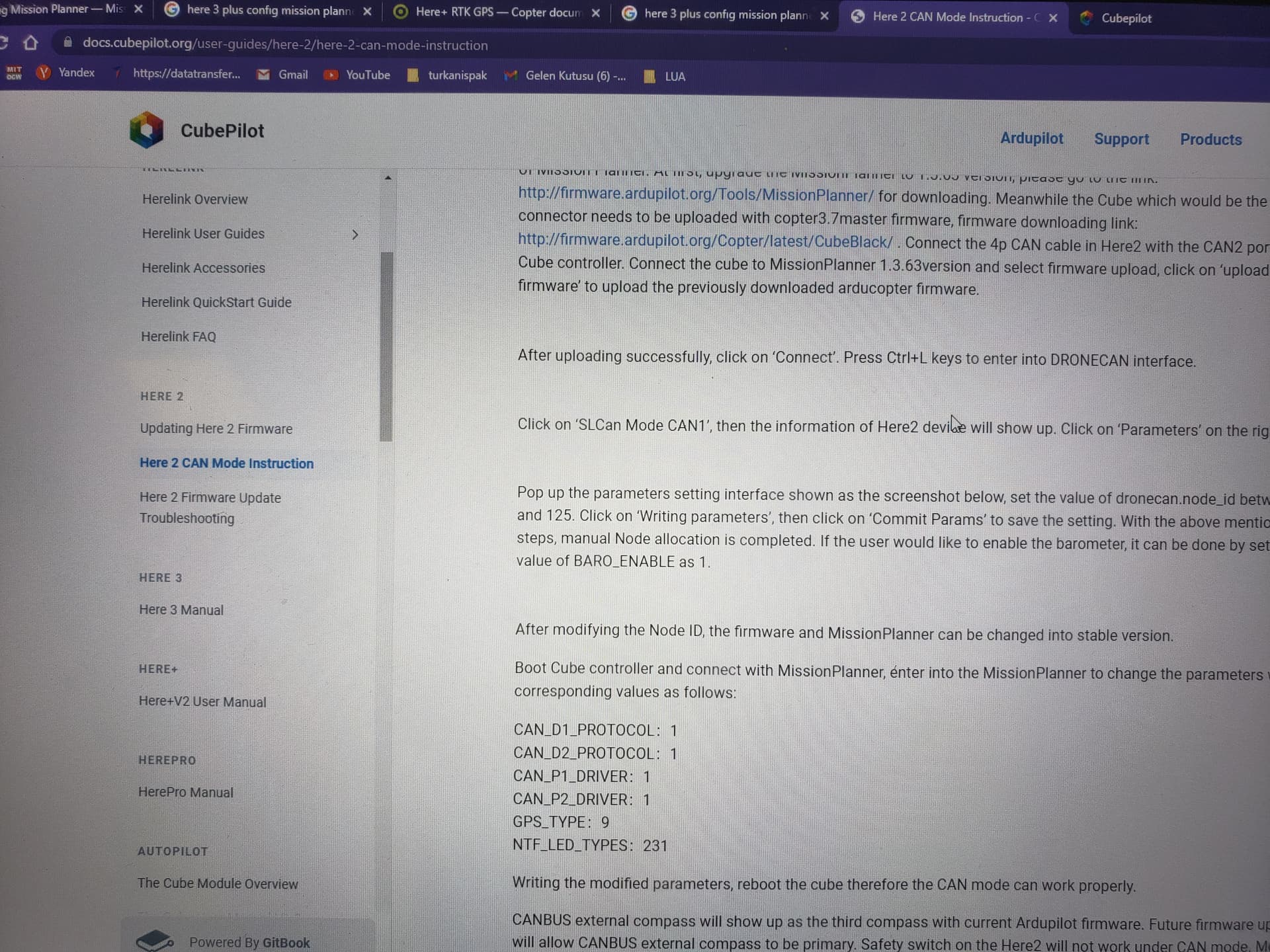
Note: Current firmware only support CAN 1 ,CAN 2 is not supported. Dual CAN will be enabled in a future firmware update. Dual CAN will be enabled in a future firmware update.
But confusingly it goes on to say connect a Here3 to CAN1 or CAN2 , and how to connect two…
So make sure you are on latest stable Ardupilot firmware and set BRD_BOOT_DELAY,3000
to allow the Here3’s to boot up first and be ready to be allocated IDs by the flight controller.
See if that helps.
I can’t test it myself, I’d like to have a couple of spare Here3’s
I see! I misread you original info.
Check you dont have conflicting IDs I suppose, and try BRD_BOOT_DELAY,3000 anyway. There’s no detriment to leaving that in place.