If you dont need the push button on the aircraft, OpenTX can do it like this, we chose channel 7 for Arm/Disarm = RC7_OPTION,41
You could potentially connect an external big red button to your transmitter
- Throttle to minimum, Arm switch down = aircraft arms
- do what you like with the Arm switch or the throttle as long as they both aren’t in the disarm position at the same time
- Land (hopefully), throttle to minimum, Arm switch up = aircraft disarms

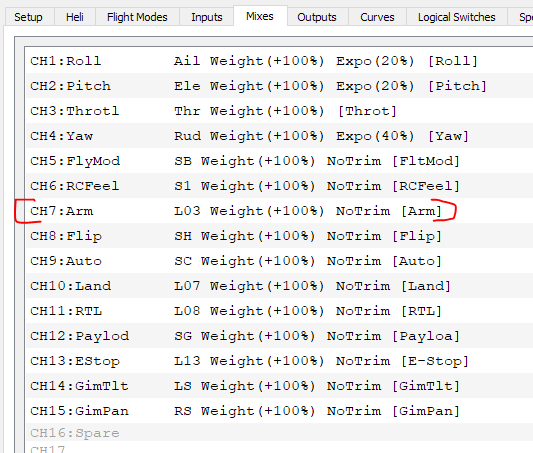

And we have RC Option 31 on channel 13 for Motor Emergency Stop