I might not know what I am talking about here, but…
Can’t the INS position be used as a backup for when a GPS fails or becomes disconnected, etc? Just for long enough to perhaps LAND (without being blown too far by the wind), or even to RTL?
I remember seeing a plot of APM’s INS postion (this was a few years ago) as opposed to where the GPS said it was, and those two plot lines agreed with each other very well.
I’m assuming that the INS position gets updated from time to time with the GPS position because the INS “drifts” over time, correct?
But still, couldn’t it be trusted for some number of seconds or even minutes to pretty much get the airframe down without flying away too far?
I had a fly away a year ago or so…lost R/C control, and within a couple seconds, also lost GPS info (two wires had come loose from the flight controller).
But I was still receiving video and OSD information. One of the things that struck me is that the HOME arrow and the DISTANCE TO HOME seemed to keep working? The distance to home kept counting UP as the frame drifted away with the wind.
Now how did that number keep counting with no GPS position? Was it showing INS position? And if so, it seems that INS info is available? So why not use it to keep the frame from flying/drifting far away?
Thanks…
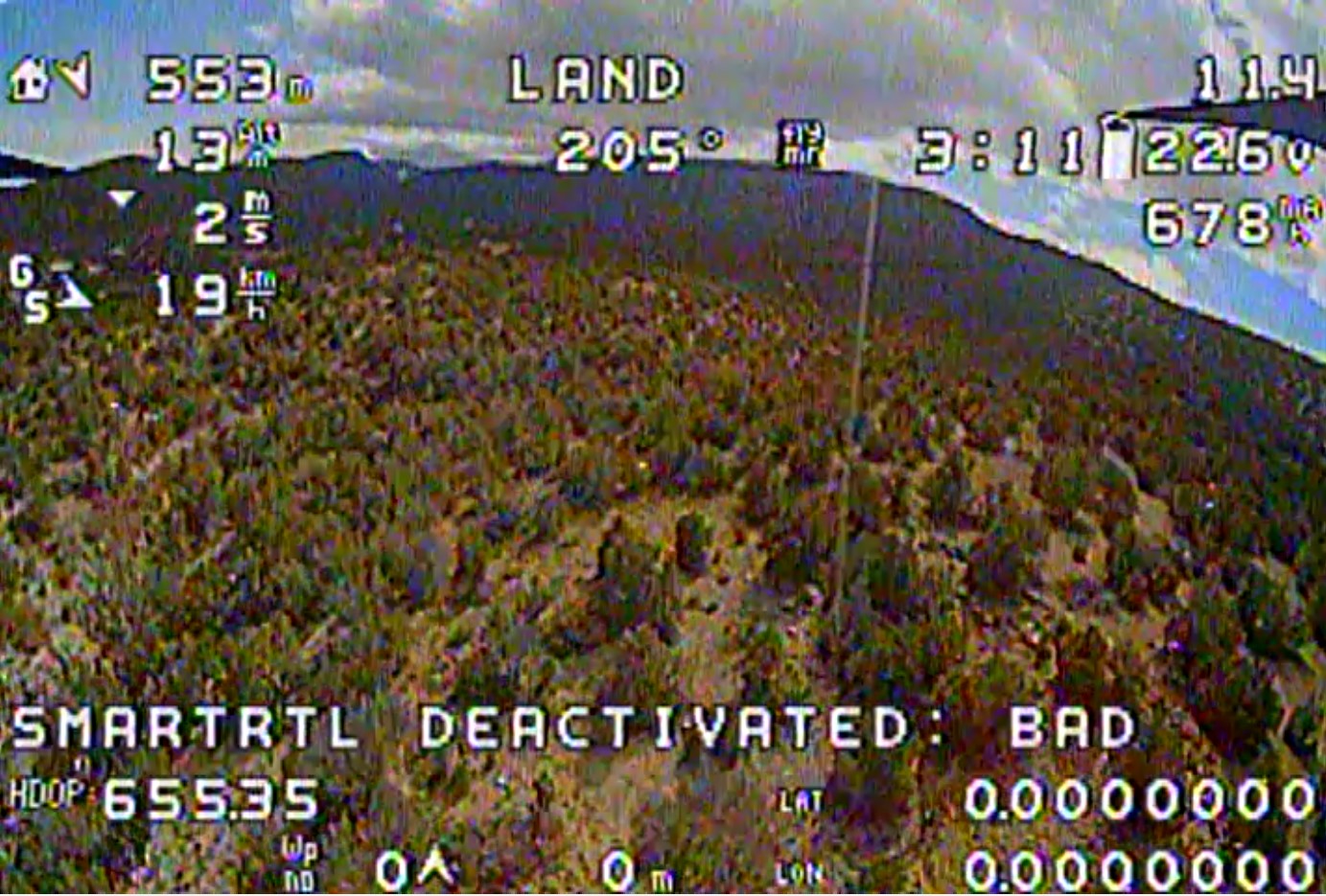
See the 553m in the upper right corner? It kept counting UP as the frame flew away, even though there was no GPS data.
I’m going to guess that you would need something like optical flow to assist in any kind of RTL without GPS. I have no experience with it (because I’m having trouble getting my optical flow sensor working) but in this video on the wiki the comment is made about using RTL even though the GPS is not being used.
Still thinking about this…I’m just talking about keeping the copter from drifting/flying away at whatever speed the wind is blowing.
I know INS accuracy degrades after loss of GPS, but there’s not enough INS accuracy to land in, oh, a 100 meter circle (or some such thing?) from something like 50 meters altitude?
I mean in some circumstances (windy) just a LITTLE effort at maintaining position could help a lot in finding the aircraft.
For Copter in particular, the high level of vibrations mean an INS solution degrades within seconds. Good enough to cover any GPS glitches, but not enough time for landing.
So are we saying that INS degradation is SO bad that the frame would actually fly a FARTHER distance away before landing than the distance drifting/flying away in a 15-20 mph breeze?
Is the solution to this optical flow? But then of course I’m talking about for frames that don’t have optical flow and/or the optical flow isn’t working or fails.