Problem: When I attach propeller to the motor from ground to test the vibrations, at 100% throttle the Plane is going to Failsafe. Same happened for my test flight and the Plane got crashed.
I’m using separate anti-vibration bed for pixhawk and mounted GPS in its stand.
But whenever I give 100% throttle, It is going to failsafe. Someone please help me. Ask any other details If you need.
I’m using Pixhawk 2.1 Cube and Skywalker X8 Frame.
Hi, Thank you for the response. I’m using a 4 Cell arrangement with Lithium Ion cells. At full charge it is 16.8V and my voltage sensor showing 15.8V. But in Mission planner HUD, it’s showing 13.9V and first I set the Failsafe to 12V and then changed to 10V for confirming this.
Also by checking this log, I found that both Compass and Magnetometer Failed because of the Vibrations. I’ve used anti-vibration bed and 3M sticker.
My guess is that I attached the Propeller (12x6) and gave 100% throttle at ground. The motor produced forward thrust and I blocked the vehicle movement. After some 40 to 50 seconds, the motor turned off and MP showing Failsafe. It’s because of mismatch in magnetic field and that may due to motor vibration.
This is completely my guess. Correct me if I’m wrong.
I hope that if this is the issue, then this Failsafe will not occur while I’m flying.
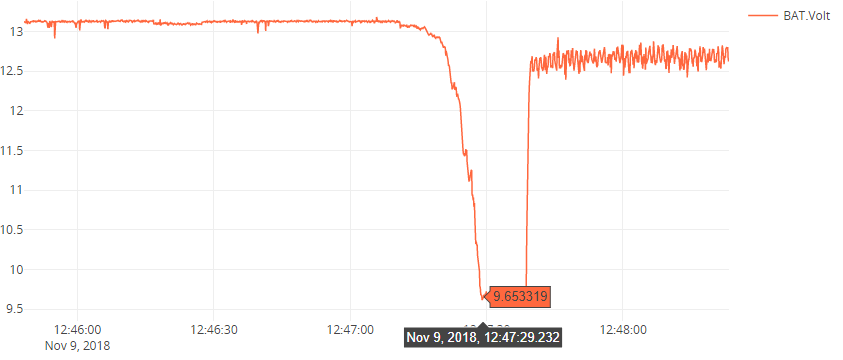
it seems to me that you’re getting a ton of sag from your L-ion battery, I have a similar issue with the titan pack I run, so i am having them custom make me a 4s L-ion pack that is a higher discharge rate to offset the sag. my battery rests at 16.8 fully charged and if I put my drone into the air, it’s automatically sagged to 15.7(ish) after just ascending 20-30 feet. and then the last volt and a half of my battery goes insanely quick, probably again because of the discharge rate being low.
Your theory might be correct but I’d honestly look into replacing that battery first and see what happens then, even if you just go get a 4S LiPo to test with, there’s less sag with one of those especially if it’s a higher C rating.
Hi Nik, I’m using 4S7P setup with LG HG2 18650 20A fast discharging battery. I’m using a long 12AWG wire to connect these battery packs to power module. (30cm). I think maybe this will make a voltage display difference in Mission planner.