HI everyone, I want to address a problem I am facing in my copter. It’s a hexacopter with firmware version 3.5.5 and running with the pixhawk 2.1(cube). In stabilize mode it flies fine but when I switch it to poshold or loiter mode it starts to wobble in a strange way. It looks like it has started autotune in pitch axis. But obviously it hasn’t. It goes on forever till i take it back to stabilize mode.
Here is the video of the copter in position hold mode - Youtube link
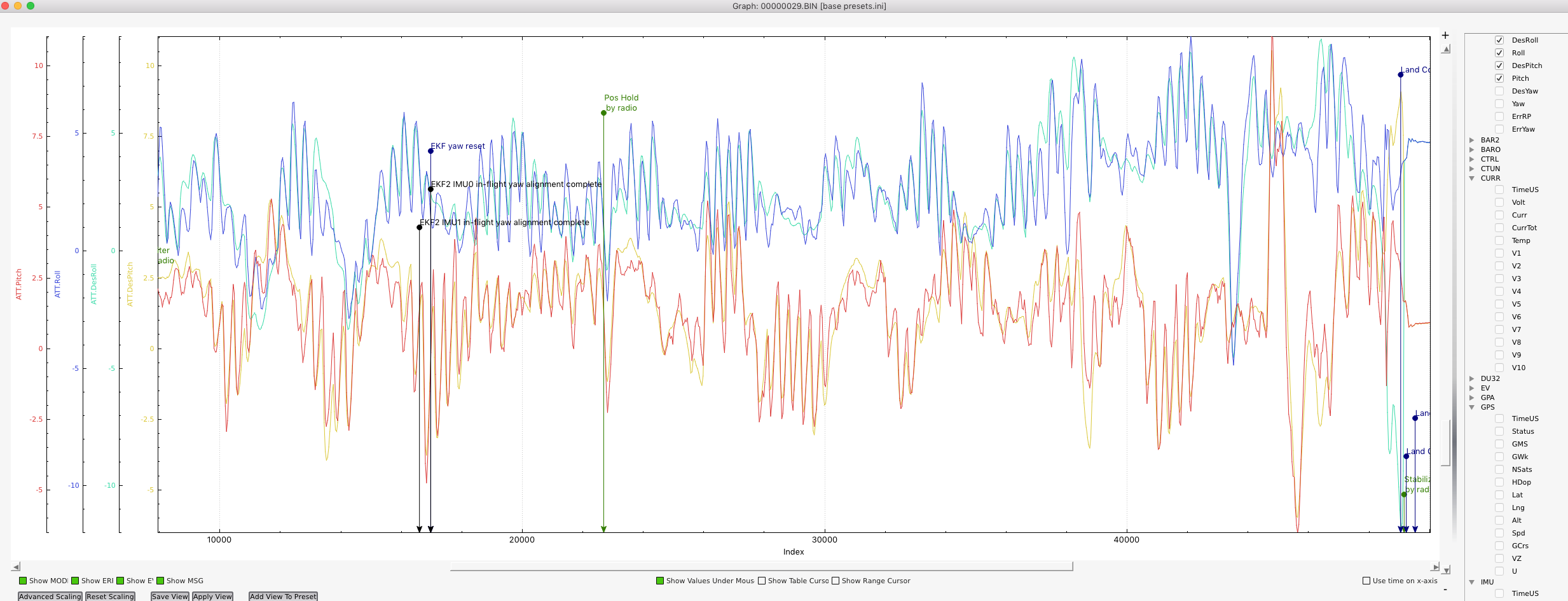
I am also providing the log file of the same flight what can be seen in the video.
I don’t have any answers for you only more questions.
Your specs look good, hovering at 1500, lower current draw, plenty of voltage (6S)
But the PH is commanding the oscillations, I have attached the Des and actual Pitch and Roll.
What size copter?
Motors?
Props?
How is the PH mounted?
Frame rigidity?
If it is running 13" or bigger props have you reduced the filter settings for pitch and roll?
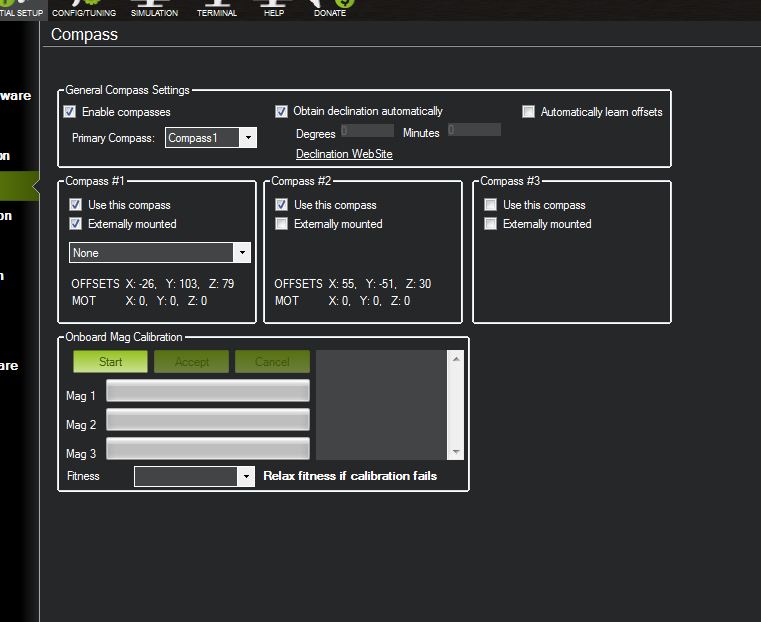
Why EK2_GPS_TYPE 1 and INS_FAST_SAMPLE 1 ?
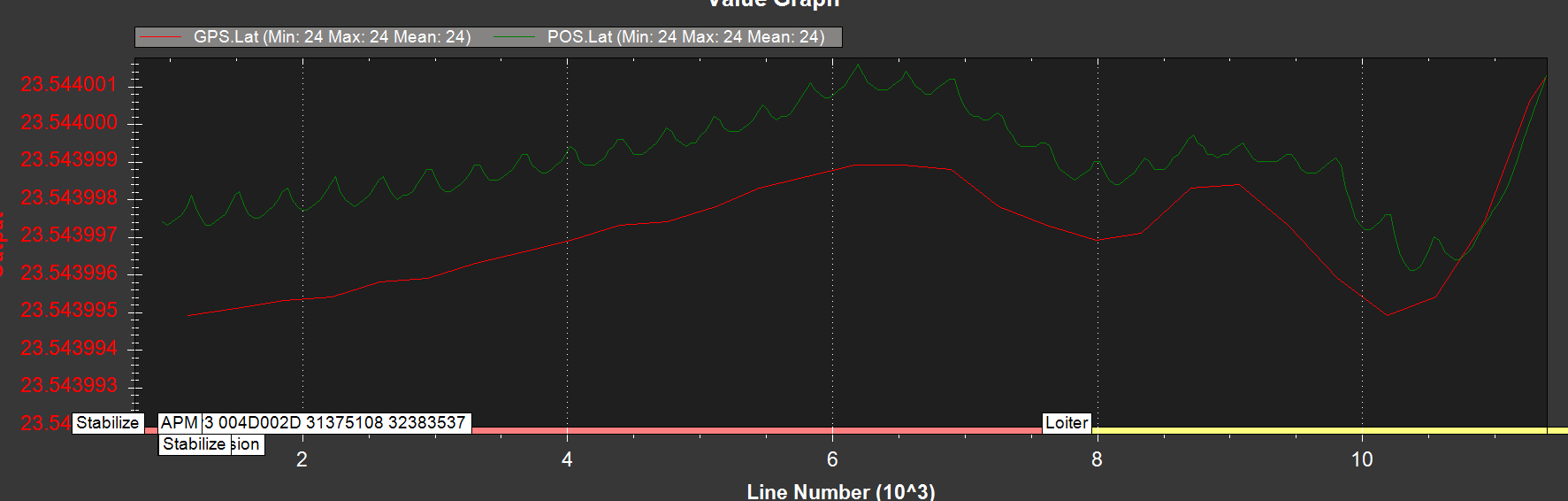
Hmm. It could be a faulty GPS or something else that upsets EKF position estimation,. Take a look at the POS.Lat values, they are oscillating even when a copter is stands on the ground. Try reverse the settings above or replace GPS module.
I haven’t changed those parameters myself. They are in default settings. One thing that I didn’t mention in the post that the drone has crashed twice and in every occasion the GPS module was the first thing that touched the ground and took all the copter load on itself. Can it damage the GPS module? From outside I can see some scratches on it.
What should be the values of the parameters that you mentioned?
Another thing is that this very copter has flown flawlessly with another pixhawk 2.1 previously.
Copter size is about 900mm.
Motors are of T-motor antigravity series
props are of 1555 dimension
PH is mounted on a 3M tape, 1 inch above the battery
Frame Rigidity is good enough. This very copter had no issue in flying with DJI naza v2 and also with Pixhawk 1.
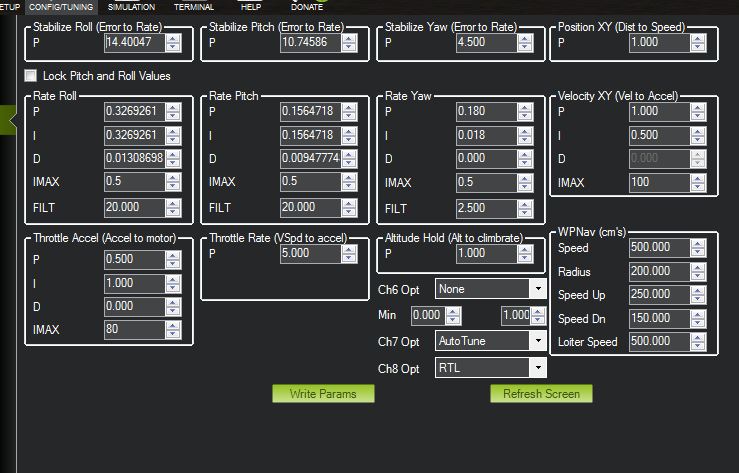
I have not changed filter settings. But I have done autotune in roll and pitch axis. Here are the new parameters.
Having same exact problem, mine does it on both pitch and roll axis. What mine does strange is that it recognize the Here main GPS a NMEA 9600 instead of Ublox.
It looks like the gps doesn’t update position quick enough.
Not yet, mine keeps acting like autotune when it is in loiter.
Played a bit with pids but no luck. Next up is a new GPS units, mine is a here unit and it is picked up as nmea 9600 from my pixhawk 2.1, maybe at that speed it is too low in updating position?
Will make more tests and see if i can come up with a solution.
Problem solved. Swapped to a new Pixhawk 2.1 and now GPS is correctly configured (u-blox 115k) and loiter is back to normal.
So i guess my problem was a faulty Pixhawk 2.1