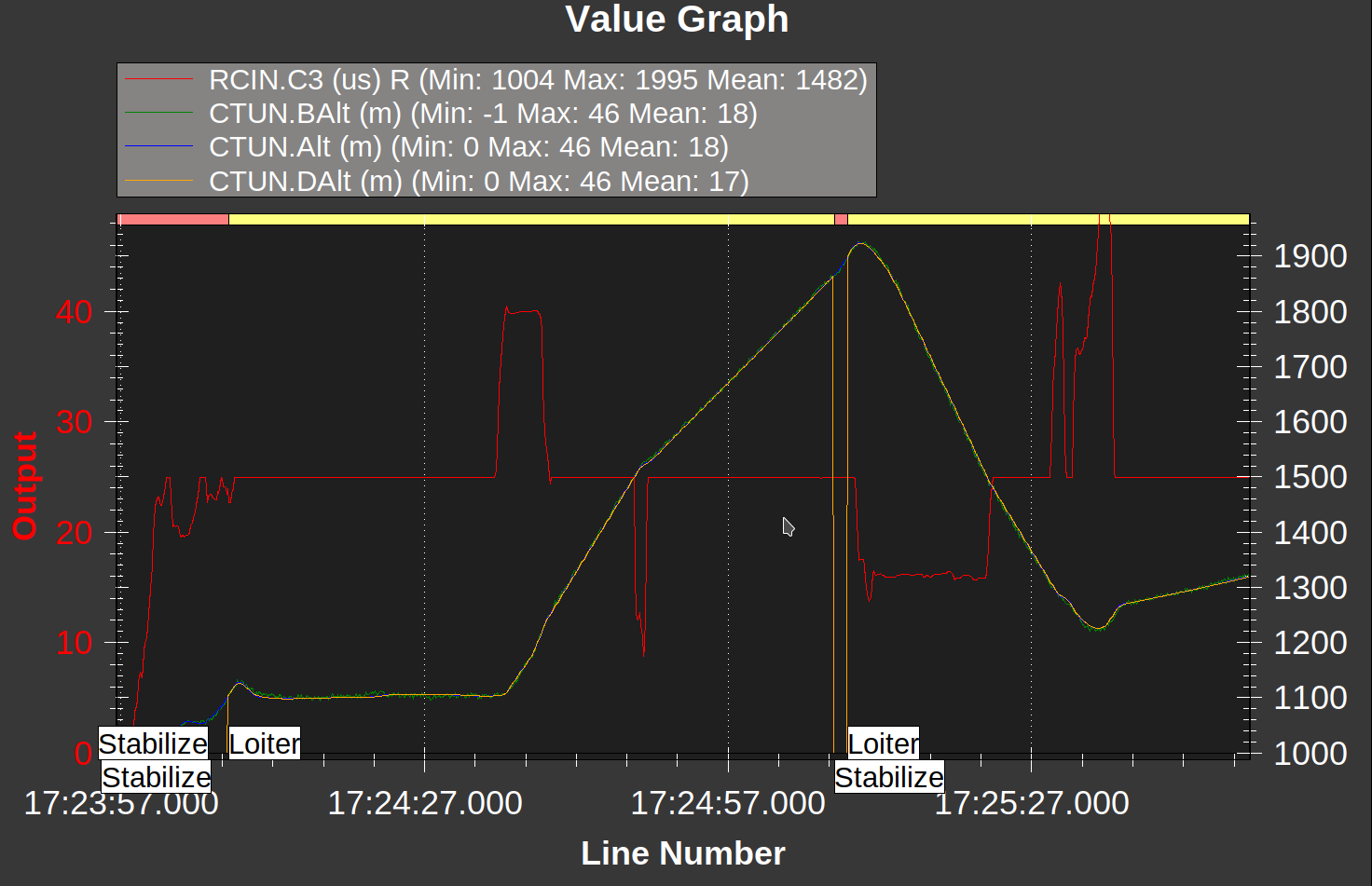
To see clearly in the picture, the drone is sinking or rising although rcin.c3 (throttle) is set to 1500. moving the stick up or down changes the sink or climb rate. in the moment that feels very unusual on the control unit.
So far, this drone has not behaved like this.
But this behavior has also occurred with another drone but has not yet been reproduced. Today it occurred in one flight all the time so that I have this log file available.
One tough, do you always takeoff in stabilize mode ? (including the other drone ?) The only difference I found between the two flights that first you switched to loiter with a relative high vertical velocity, then at the second flight you switched with an almost zero vertical velocity.
I know that this should not be the cause, but this is the only difference. (an add to the mix, that people rarely takeoff if stabilize and switch to loiter)
I cant say what’s causing the sudden jumps in desired altitude, the only altitude related things I saw are:
PSC_VELZ_P is high, I think 2 is normal
Also these new values, set based on the tuning guide:
PSC_ACCZ_I,0.796
PSC_ACCZ_P,0.398
But I noticed some other things to fix:
Motors 1 and 4 are consistently high output, Motors 2 and 3 are low output - indicating a weight imbalance towards the right-rear.
INS_ACCEL_FILTER could be higher, maybe 15 or 18, but your vibes are nice and low so it could even be up to 20
ATC_INPUT_TC is very high (extremely slow RC response), normal would be around 0.2 or up to 0.3 for larger craft.
ATC_RAT_YAW_FLTT would normally be 10, same as your other FLTT values.
Based on the existing parameters, a lot look fairly standard, which suits about 10" props, and your pitch/roll response could be better, I’d probably also alter these PIDs
ATC_RAT_PIT_P,0.12
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_D,0.007
ATC_RAT_RLL_P,0.12
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_D,0.007
Give it a gentle test flight after altering all that, and if it seems OK, then run Autotunes.