Hi, Is optical flow a requirement in Stabilized Mode? We are trying to tune a heavy X8, with off-centre mass.
Our UAV is drifiting,even before lifting off the ground.
Log attached
log_file
In Loiter Mode, we are trying to use external Visual Inertial Odometry.
Also, Our Mot_PWM_Type is set to normal, can that be the issue? We are trying to do tuning , but vehicle is not lifting.
No, optical flow is not required. Did you do Alt-A in mission Planner?
Does it have enogh power to lift it’s height? Does it work when you remove the off-center mass?
No , we are using QgroundControl in Linux environment.
We adjusted the values as per the tuning guide documentation.
I specifically wanted to ask about MOT_PWM_Type,
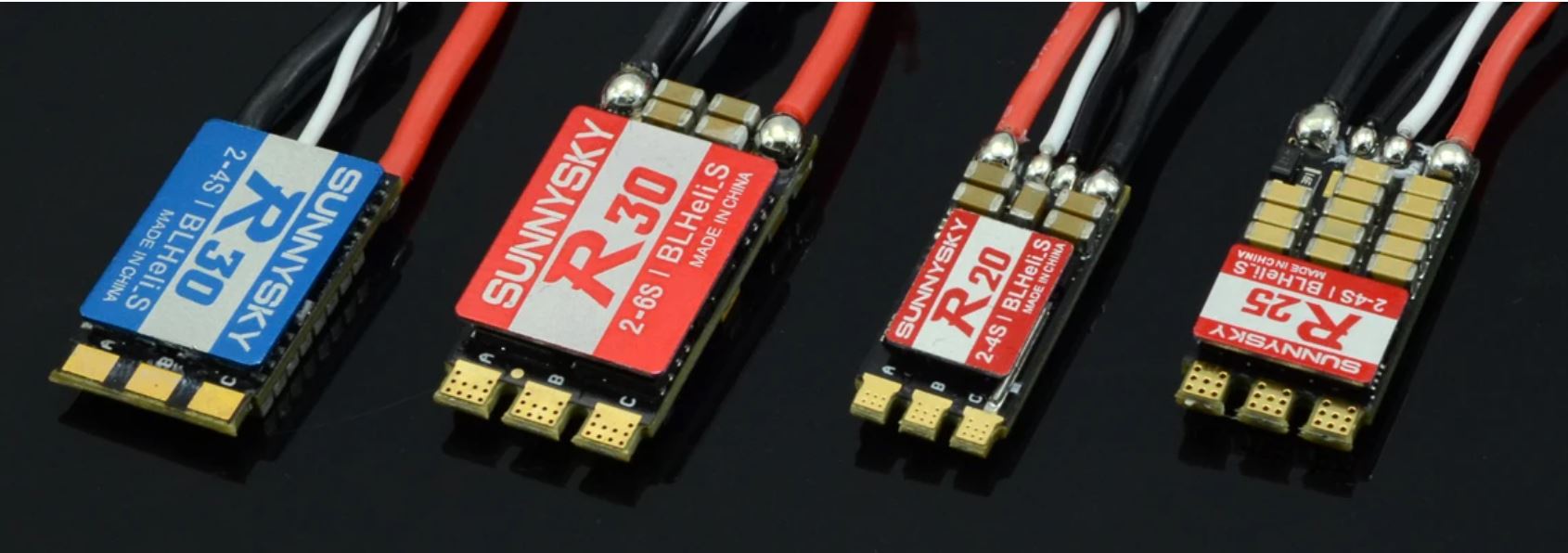
We have set it to normal , our ESC is a 4 wire one from SunnySky , the fourth wire is for telemetry,but we son’t know whether dahot is supported.
dkemxr
September 3, 2021, 2:25am
4
If they are any of these they do not support Dshot natively. Older BLHeli_S stuff.
Nope, surprisingly Sunny Sky is providing this 4 Wire ESC,they confirm that 4th wire is for telemetry, but, they don’t even tell me, which protocol is suitable for this this ESC. Right now, I am not using the 4th wire.
Right not, I am using MOT_PWM_TYPE = Normal, the document is not adequate.
dkemxr
September 3, 2021, 1:06pm
6
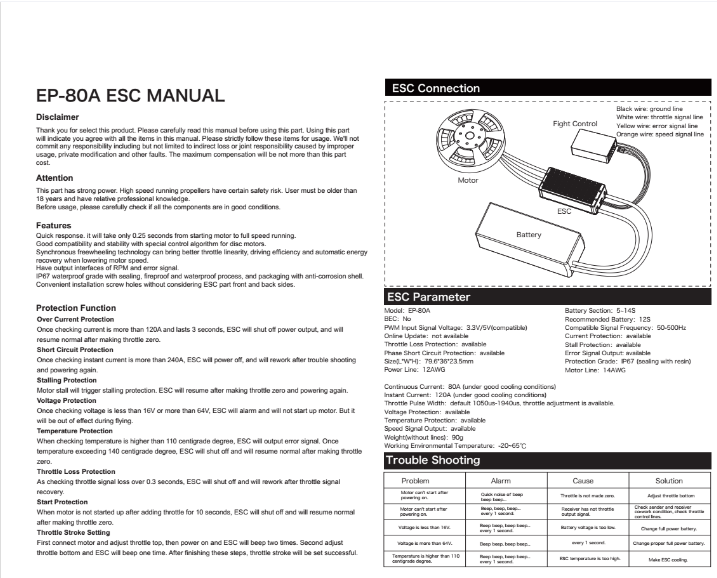
It’s only PWM. Says it in another spec sheet I saw:
“Telemetry” may be a bad translation for “configuration interface”.
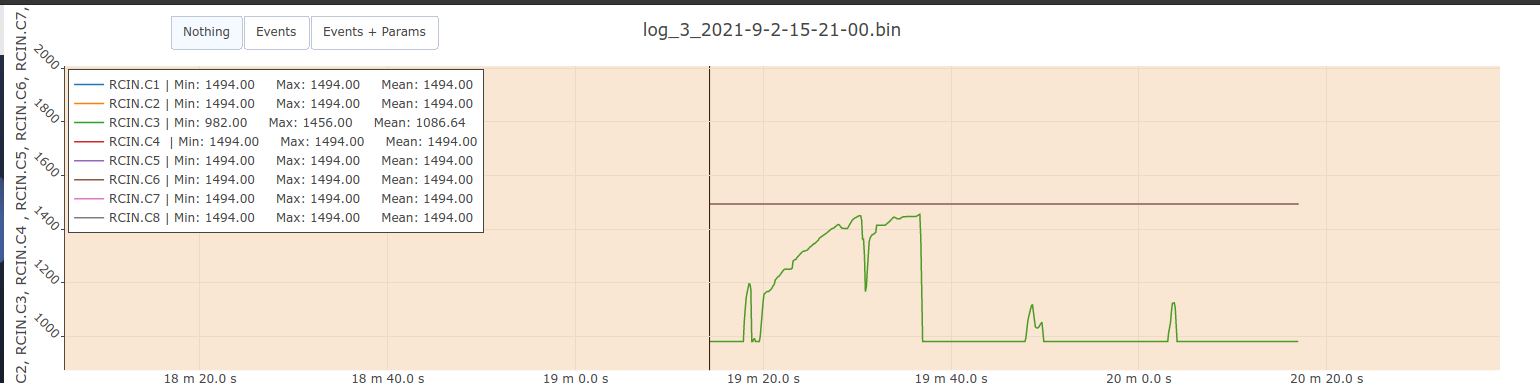
Actually What is worrying me is RC in and Motor ppm output , I’ve done one by one ESC calibration as per Ardupilot Documentation. But these curves tell a different story.
Actually we are not doing test bench trials with Motors and ESc , when MOT_PWM_TYPE = Normal , our motors are generating less thrust and low amperes.
MOT_PWM_TYPE = Normal
Throttle = 100% Motor Amps = 20Amps Thrust = 3kg
MOT_PWM_TYPE = DSHOT
Throttle = 100% Motor Amps = 25 Amps Thrust = 4kg
I don’t understand ,which mode to choose.Manufacturer’s documentation is poor.
RC IN and RC Out hold no value in our case ?
dkemxr
September 4, 2021, 2:40am
10
No. There is a lot of code between RCin and Rcout.
Just configure it for Normal PWM and move on. And unless it’s BLHeli_32, which it’s clearly not, forget about telemetry.