Hello guys, my copter won’t hold altitude properly in loiter mode (also althold). it floats up and down just like the barometric alt graph, but somehow the FC/autopilot says the copter is stable, and no automatic correction is made. How can i fix this?
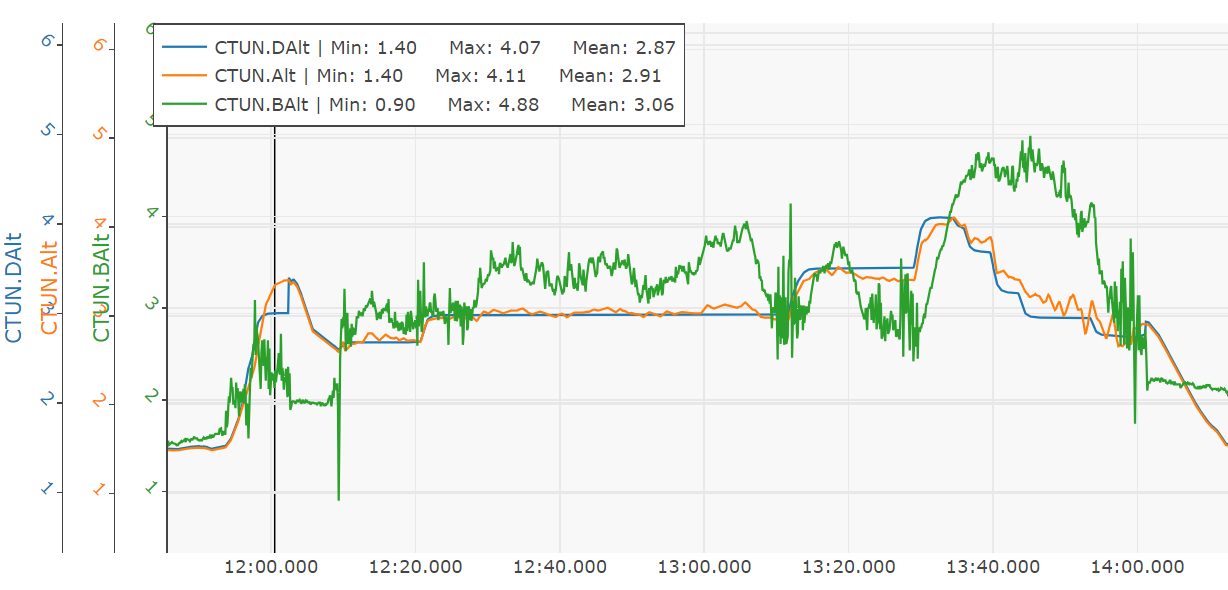
Orange is what the EKF thinks the altitude is. It’s blending sensors, so a number of things can affect this - in particular good GPS lock. Also worth making sure the baro is well-covered with foam so that it’s not giving erroneous data.
Thanks! i’ll check it out
yep, but i didnt use gps for posZ and velZ in ekf3, only baro on src1 posZ… hoping that it would ignore gps for Z axis at all. Yet it still won’t consider baro values at all.
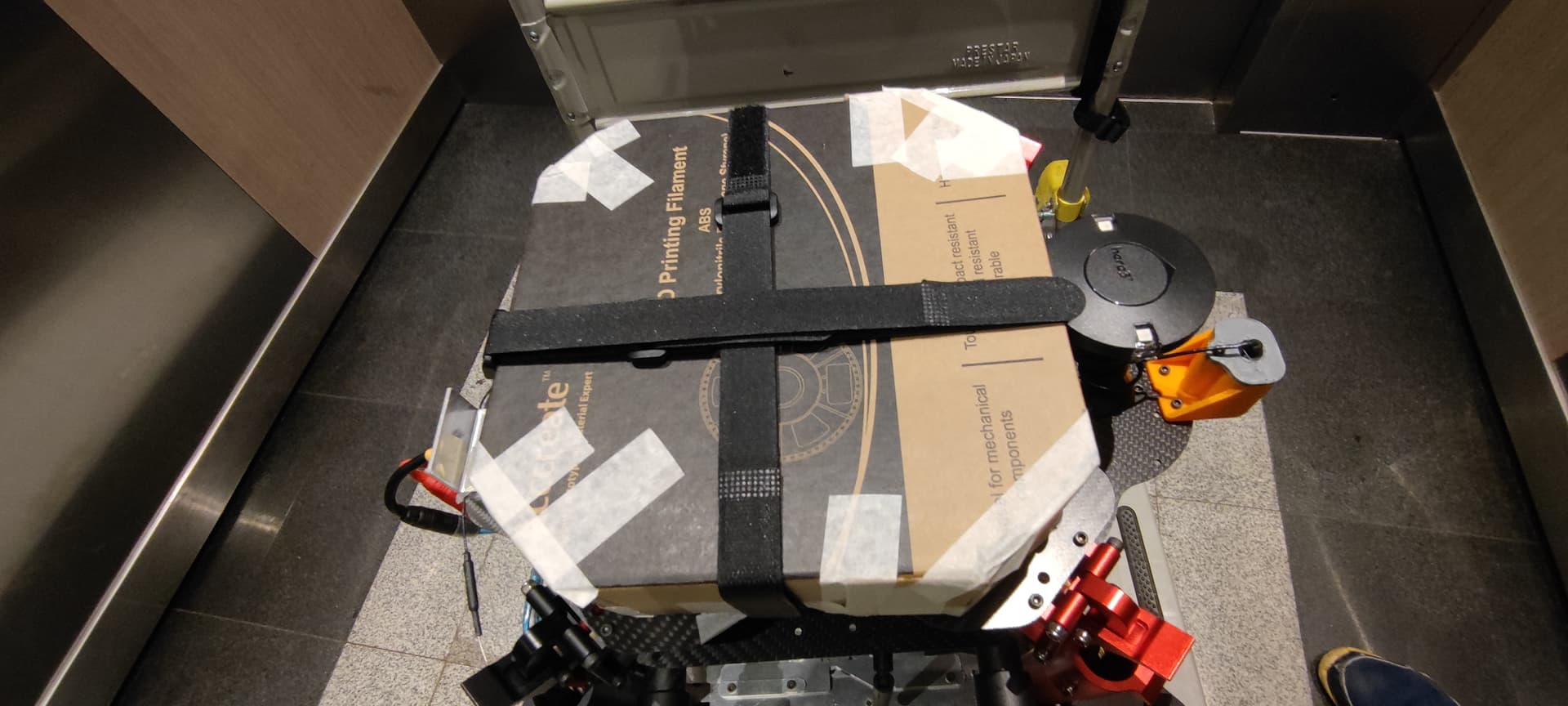
i’ll try covering the baro next
our temp cover to do the verification yesterday, it helps reduce height drop when the wind blows. We have a down-facing rangefinder and I have tried to ask EK3 to “listen” more to the rangefinder, still, the height drops significantly when wind blows.
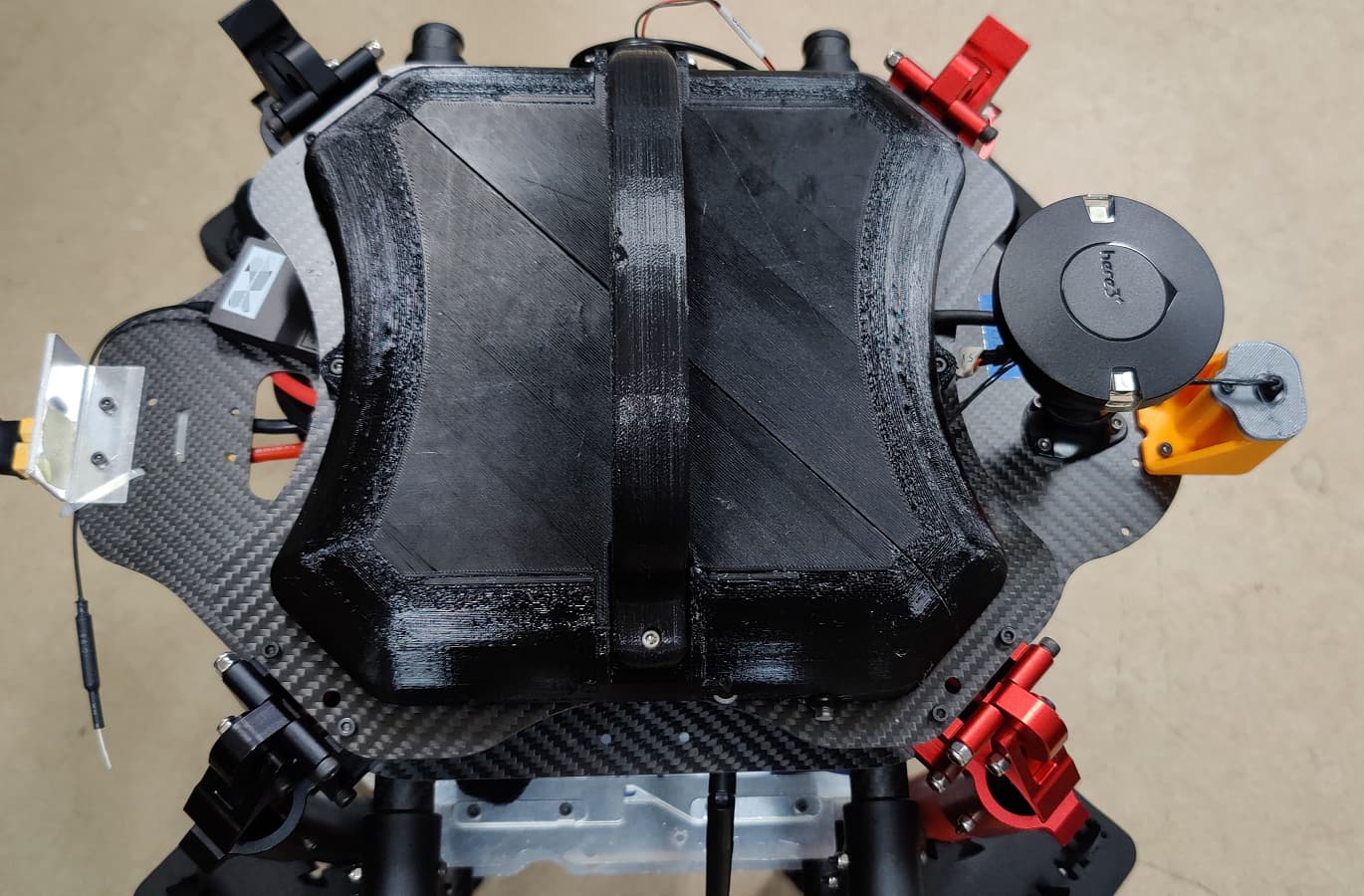
we are now working on more covers to also reduce the z vibrations from the prop wash.
[update, dress up and superb height holding]
3 Likes