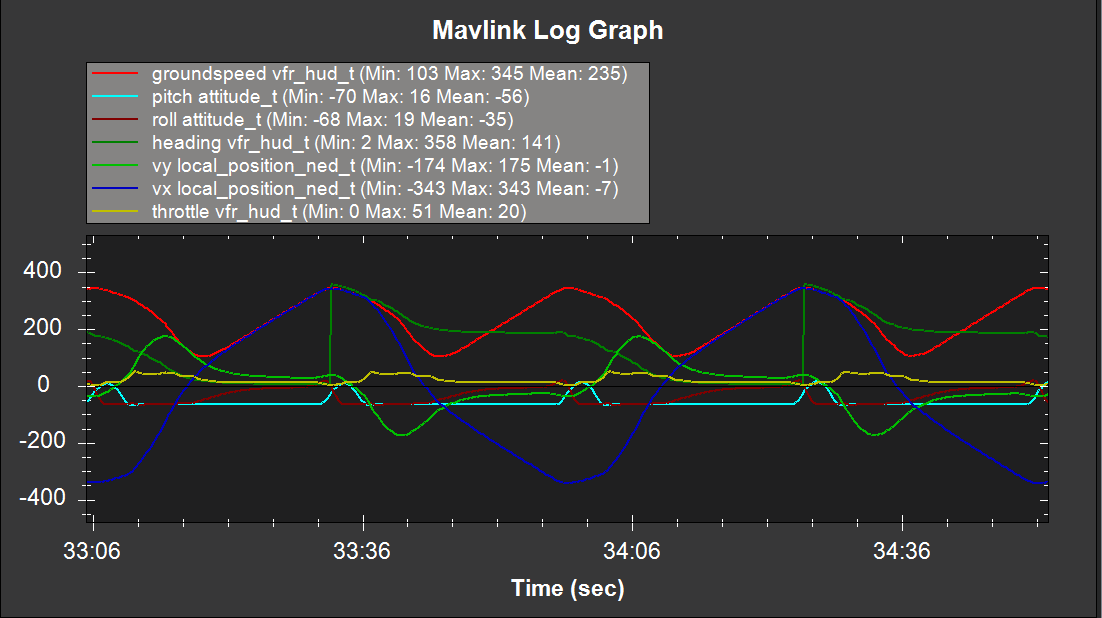
included is a Mission Planner Log graph of ArduPilot making a turn in AUTO mode on a Spline Waypoint. The speed is set to 100 m/s in a SITL simulation. What is causing the speed, roll and pitch ocillations. How can I get a constant roll pitch attitude when making a constant turn at constant speed?
Here is a working Quad with no oscillations. I bypassed the PID controller in:
libraries/AC_AttitudeControl/AC_PosControl.cpp/AC_PosControl::rate_to_accel_xy(
//ben020514
_accel_target.x = _vel_error.x;
_accel_target.y = _vel_error.y;
In SITL an Ardupilot controlled Quad travelling to the speed of sound 340 m/s. It has 0.1 hover thrust, and Max Angle of 66 deg.:
libraries/SITL/SIM_Multicopter.cpp/MultiCopter::MultiCopter(
//ben020514
////frame->init(gross_mass(), 0.51, 15, 4radians(360));
frame->init(gross_mass(), 0.1, 1000, 4radians(360));
Simulation Mission Success. Time to try a real UAV.