Hi, We had a crash recently on one Hexacopter that was flying close to a building. The drone was flying in Loiter mode when at one point it started drifting and the pilot switched it to Land mode. While descending the drone hit the fence failsafe and entered Brake mode which further confused the pilot leading him to disarm the drone in flight. I have gone through the flight log and fail to understand the exact reason that caused the drift in Loiter mode in the first place.
A few more details 1) This was a tethered drone 2) It was using Gps for yaw heading. Possible causes for the drift could be A) The tether hindered the flight leading to control issues B) Loss of GPS accuracy (there was a jump in HACC in GPA logs) C] Motor failure
Can you have a look and share any insights ? Thank you !
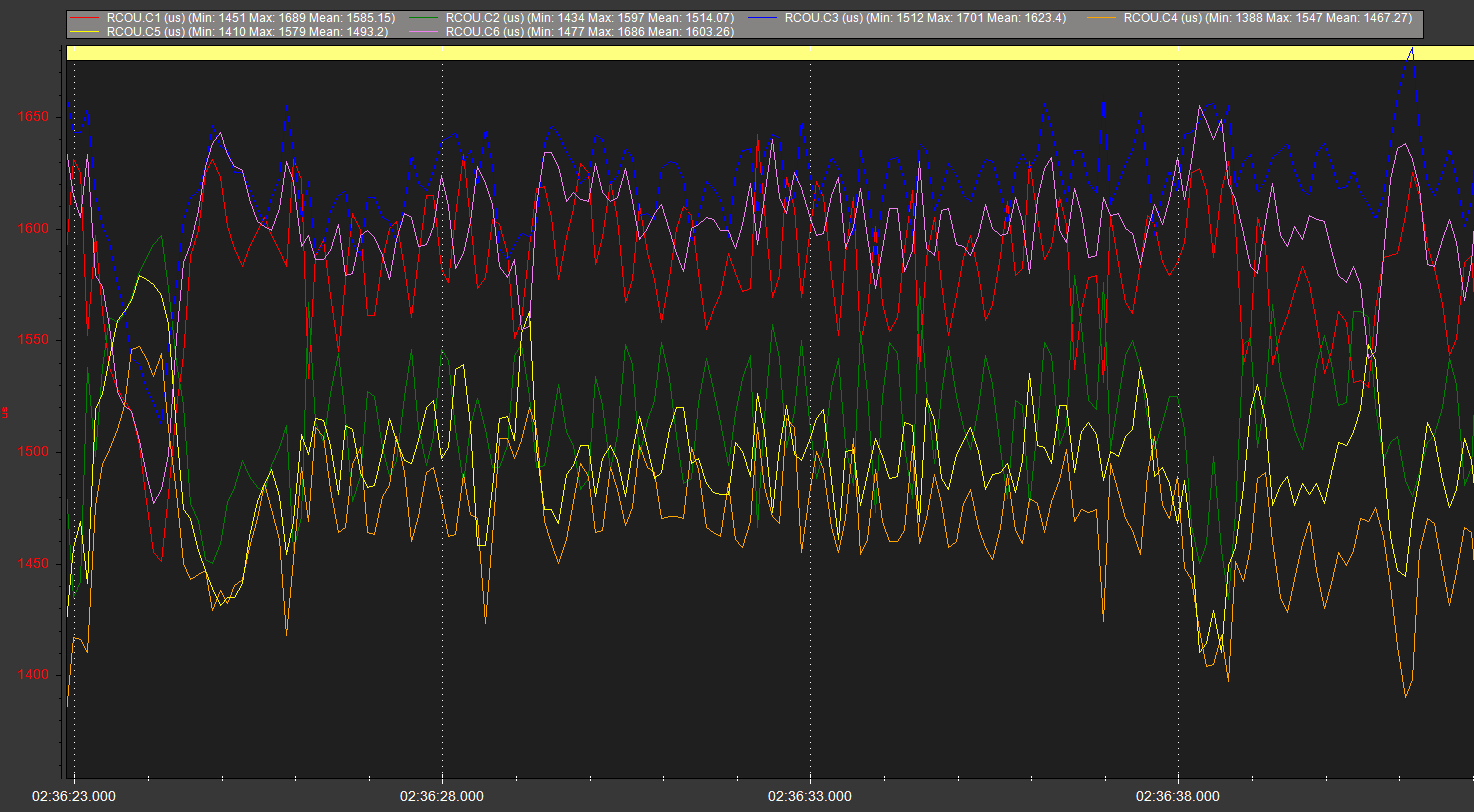
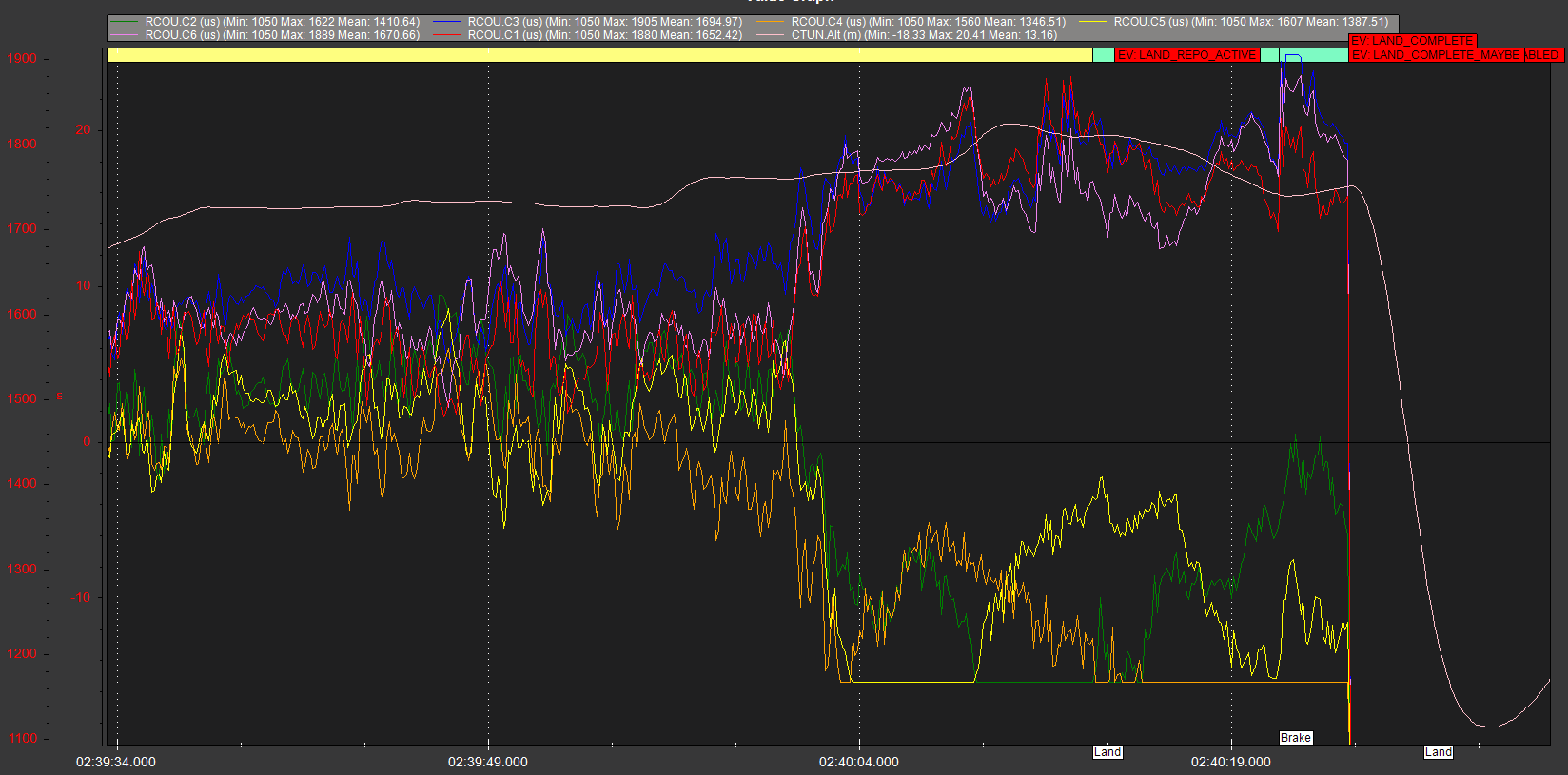
Then at the end it looks like the CW motors were not producing enough thrust and CCW motors were being commanded to minimum to try and maintain stability
There’s no single motor failure though. Current consumption goes to double the normal values.
So it could be that the tether reached its limit since pitch and roll depart from desired values but not radically.
It could be that motors and ESCs couldnt handle the load.
If there’s ever doubts about positioning, stability or a possible fly-away the pilot should switch to Stabilize mode. Land mode could work if you dont mind what you hit on the way down.
Probably change FENCE_TYPE to 3 unless you have uploaded a fence polygon. In this case you started the fight outside the fence too.
Buildings can potentially cause multipathing of GPS signals and could be the reason for drift. The GPS statistics dont look too bad to me, but others will have much more experience in that field.
I think you should change GPS_GNSS_MODE and GPS_GNSS_MODE2 to 67 and see if that makes it more reliable.
For example where I am we have lots of Beidou sats visible but the HDOP is worse than just using GPS and Glonass (GPS_GNSS_MODE 65). We dont have SBAS either.
My take-away is improve the tuning from the beginning, then you know it’s not the cause in a situation like this. Actual problems will stand out from the noise.
Hope some of this helps. I could have missed some things.