I am totally new in making drone, I am using s500 body with pixhawk 2.4.8.
My drone cannot take off, it is so unstable and crashes after flying I feet above the ground it flips down. should I need to tune its software or hardware. I think my hardware is fine and there is no problem in it.
can anyone help ?
If this is your first drone dont use version 4 as it still in beta
also
Post a log file

Thanks for reply, i am trying to install it, but during firmware download it is giving error of connection fail. İs there any other way to download beta and Install.
I will check how to see log file thanks 
Thanks @wn0x
Yes they are in same order.
You can download the firmware you require if the click download on the front page of the Wiki
Click Copter, stable then the board you are using.For pixhawk 2.4.8 I am not sure what board to pick. someone else might tell us which one.
If you right click on the apj file you can download to your computer
In mission planner from the install firmware screen chose Load Custom firmware and close the apj file you downloaded
Be careful follow the wiki, @wn0x said make sure the props are on correctly.
Have you any RC Experience?
1 Like
Now installing beta 4 version and I feel my compass is not good,
I am using internal compass of Pixhawk 2.4.8 and here are my values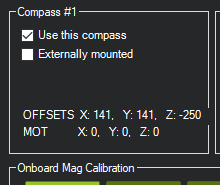
Are they fine, and yes I know how to fly drones I had some drones but new in making them.
Thanks To all for heping .
It’s generally not a good idea to use the internal compass. If you have an external GPS with compass, that is the better way to go. The internal compass in the FC is often next to power distribution components that produce strong magnetic interference.
Thank you so much @wn0x I will try that and let you people know
Which part of “DO NOT INSTALL BETA FIRMWARE” do you not understand?
If your compass offset numbers are not yellow or red, then you are good to go.
@Rich: I have 2 FMUv2 and 2FMUv3 Pixhawks. I use the internal compass on all 4 of them. COMPASMOT takes care of the interference.
Dude, the OP is building his FIRST drone. Do you really think its a good idea for a noob to be using Beta Firmware? I sure as heck don’t.
I agree, there are many ways to skin a cat. That is why I use COMPASSMOT. What ever cranks your tractor…
Why does it feel like you’re always yelling?
3 Likes
Because some people refuse to listen, and I can’t reach through my monitor and give them a Gibb’s slap.
1 Like