Hi I’m testing a newly built quad tethered by hand before flying and have noticed a couple of issues:
At the point of liftoff the quad starts to oscillate fairly violently but smooths out if more power is applied and oscillates again on throttle down.
The throttle is very on/off. Drone either rockets up or drops like a stone. I want to be able to sit in the hover zone.
My set up is: 270mm quad
COG sits about 3mm below the prop c/l
FC - Micro APM 2.7.2 Firmware: AC 3.2.1 / AP 3.4.0
Aerostar 30Amp ESC
EMax 2205 2,300kV, 4s
Props: 5" x 3"
Flight Mode: Stabilise
Otherwise most flight settings are default in Mission planner
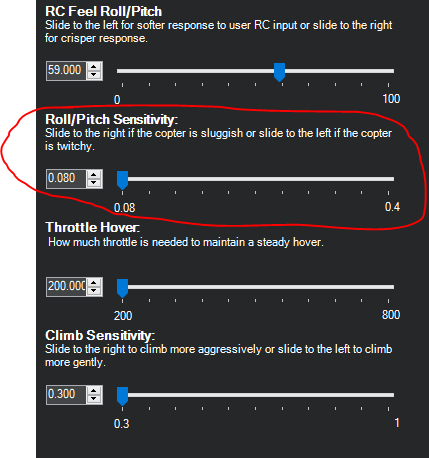
In case another Newbie has this issue, by reducing Roll/Pitch Sensitivity to minimum in Basic Tuning the quad was stable at hover. Its most likely due to the COG being almost in line with the plane of the props. I reduced a few other variable to quieten it down whilst I was there.
The throttle issue was because the motors would not power up until 10% throttle so it was difficult to control. I re-calibrated the radio but no luck. So I moved the throttle trim up to take out the ‘freeplay’. Probably not the best solution but the only one I found worked to give me a smooth throttle application.