Well, I think it is good idea, to show you mechanical schematic of the vehicle.
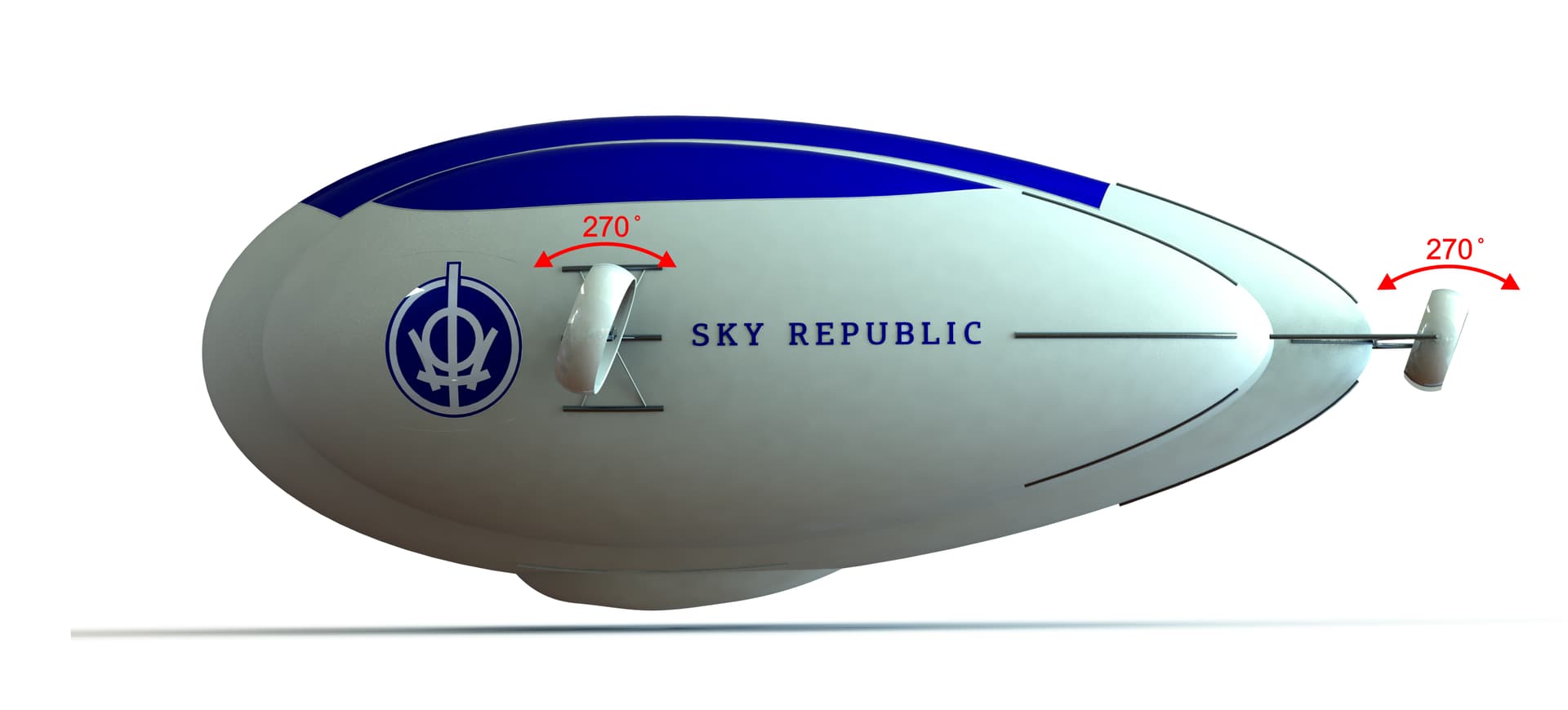

As you can see, there are two side motors (Thrust 8 kg), and servos to tilt them forward and backward. Tail assembly is almost the same, except that there are 4 motors set (2 kg each).
And the question is: how to control it?
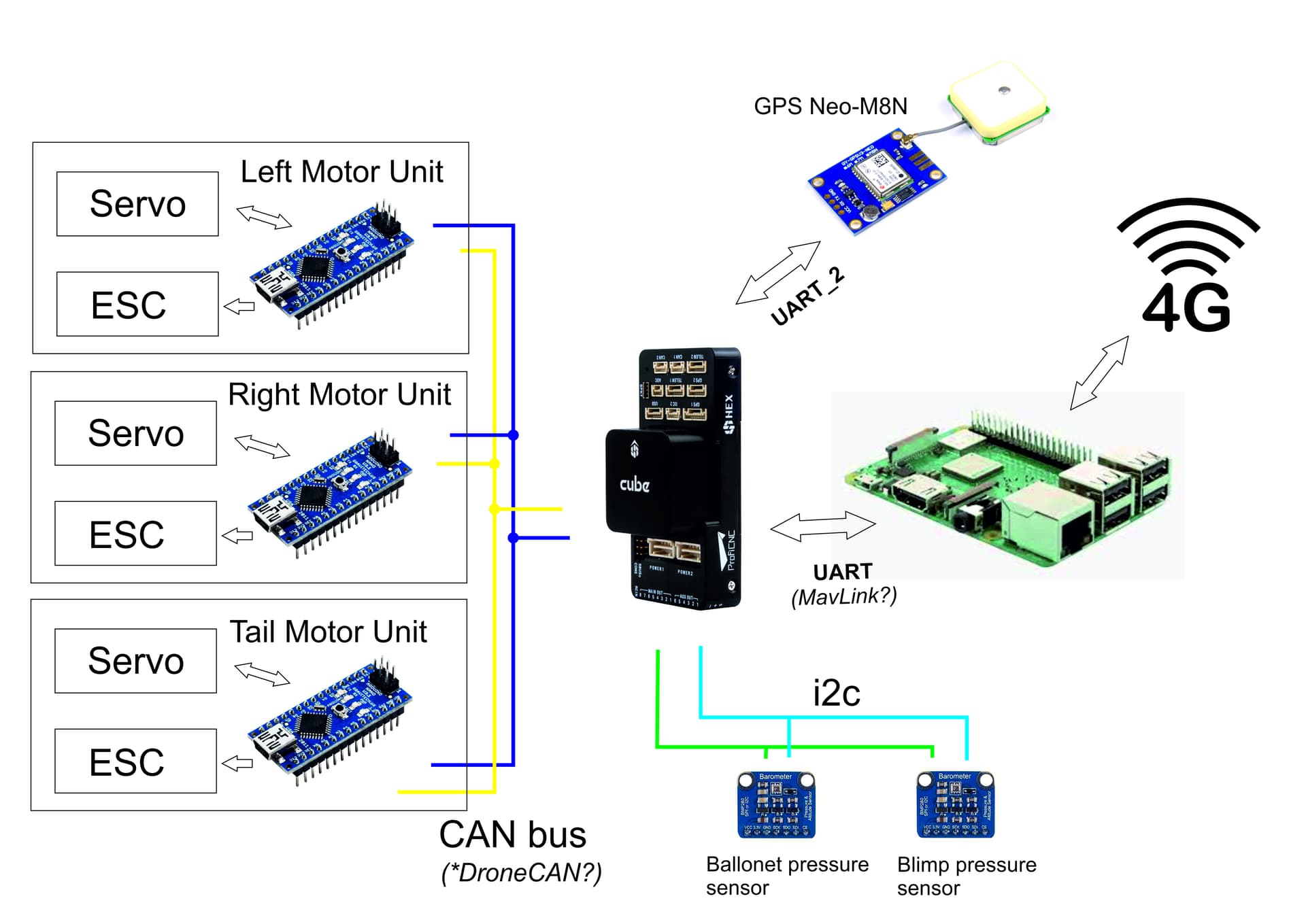
I used to use RS485 with my own Arduino Mega controller and it even worked, but now as I want to use ArduPilot and PixHawk2 I’m going to use CAN bus. So I think it should be something like this:
Does it seems real? Can somebody navigate me to how i need to change ardupilot source code and compile it? I already diging in WAF and so on, but if there are any advice, I will be glad to read them))
Is it appropriate to tag people, to let them see this topic? Some forum search brought me an information, that @MichelleRos could be interested, sorry if I’m wrong.
P.S. I didn’t mentioned: BMS, air-pumps, solar energy management etc. because it is less important for now.