During the last few years, we have dedicated time and resources in the sector of fixed-wing UAVs, here in the Control Systems Laboratory of the National Technical University of Athens - School of Mechanical Engineering.
Part of our efforts was the construction of a long-term testbed for our research in fault diagnosis. The result was the Unmanned Aerial Testbed for Rapid Prototyping (UnATRaP).
In this series of blog posts, I will present the UAV in detail and discuss in-depth on the design choices that were made. While this subject may not be of scientific interest, I’m sure there are many people making their start in the UAV community, who would find it interesting. I was certainly in need of such material during the construction of UnATRaP.
Thankfully, I had the invaluable help of a couple of good friends with more experience than me in RC things, which made up for my lack of building and flying skills.
Overall Specifications
First off, let’s have an overview of the UAV:
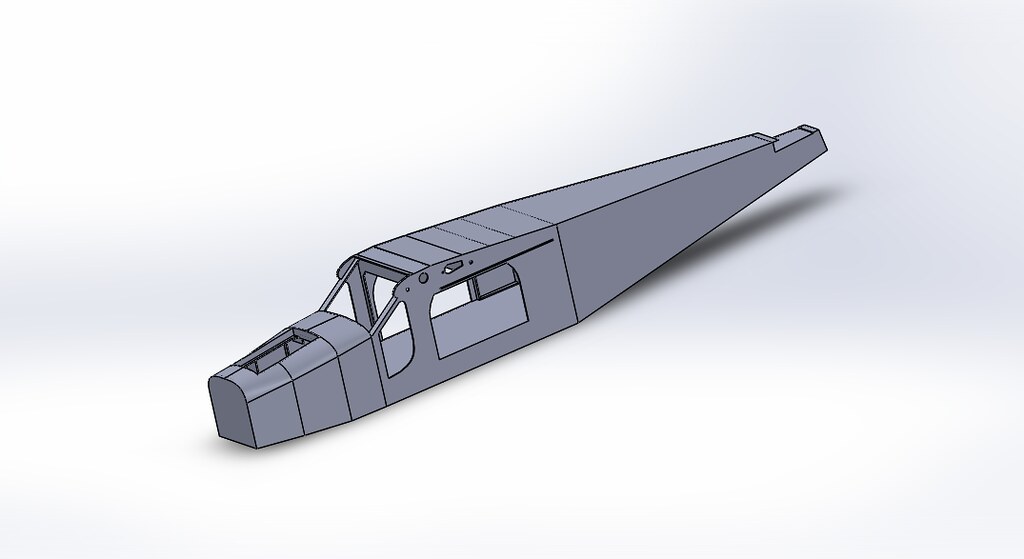
- Based on the VQ Model Pilatus Porter PC-6
- Wingspan: 2.72m
- Length: 2m
- Empty weight: 10.5kg, depending on configuration
- Powerplant: DLA 32cc IC engine, turning a 20x8 propeller
- Autopilot: Pixhawk 1, currently running ArduPlane 3.7.1
- Fuel tank capacity: 1lt
- Flight time: ~45mins
- Payload: 1kg
Typical Uses
As a university laboratory we never needed an UAV particularly optimized for long range, endurance or mapping missions. What we need is a workhorse bird, able to carry a lot of prototype equipment (sensors, computers, radios).
At the same time, we need a reliable low-level autopilot. Since our current research interests don’t include classic aircraft control (that’s tres banal), there is no reason to build our own autopilot hardware and software.
Ideally, the whole system should be as modular as possible for easy maintenance and future upgrades. Modular payload bays, access hatches and removable parts are very desirable features.
Finally, the overall UAS must be easy to build around and operate.
Its intended use is to host as an experimental testbed for
- Aerodynamic Parameter Identification algorithms
- Fault Diagnosis research
- Miscellaneous scientific work stemming from our laboratory, that merits a real-life experiment
- Custom and fun DIY UAV projects
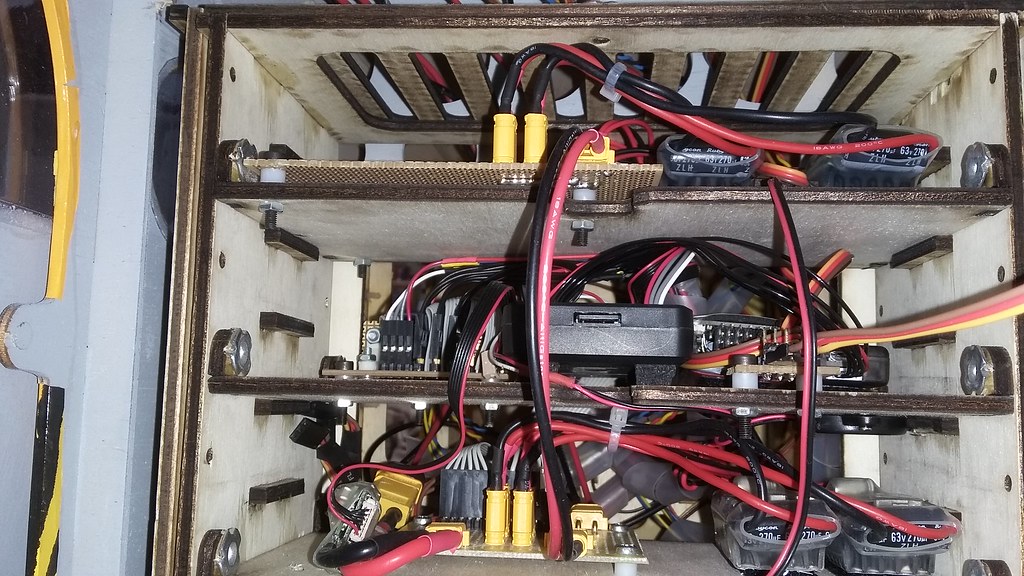
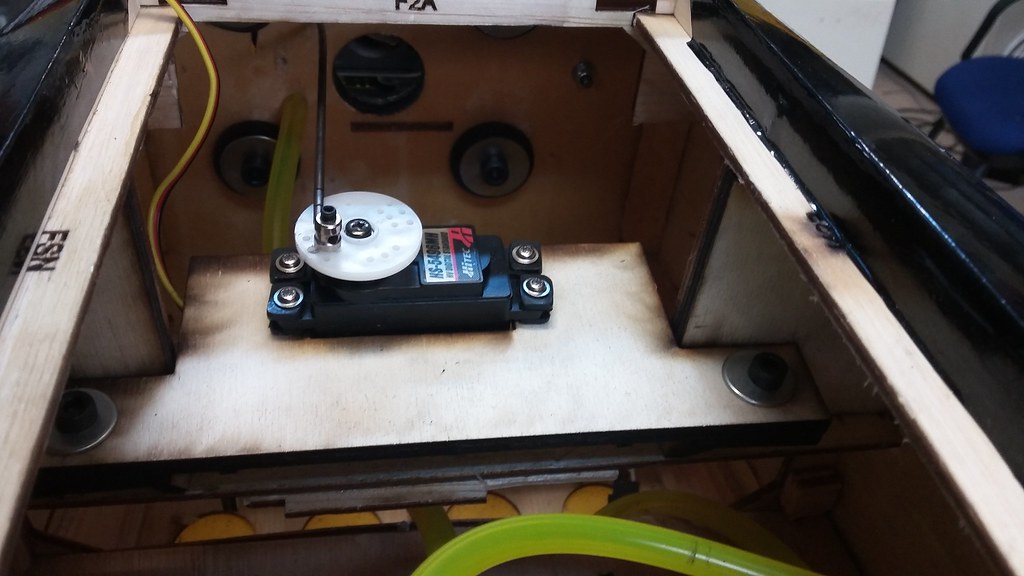
Over the next blog posts, I will discuss topics on structural modifications, electronics instrumentation, procedures and supporting components. Until next time, here are some teaser photos:

Next article: Part 1: Selecting the airframe