Hi Team,
I have been facing the isse when I try to arm the copter in loiter mode. I have connected my GPS and led is green when it is in stablize mode. WHen I hcange the mode to loiter it changes to yellow and get error in the screen PreArm need position estimate. I have done the calibration couple of time and checked wiring. everything seems to be good. Not sure what the error is. Any help on this please ?
1 Like
- Loiter requires “GPS Lock”
- Stabalize does not require “GPS Lock”
If you want to take-off in loiter you need to wait until you get a GPS lock.
Hi lucas,
Yes. For stablize mode we dont need GPS. Im able to arm and lift in stblize and altitude mode.
I could see good GPS signal and my location in map too. I see led glows green which indicates good gps signal.
But problem comes only when i change to loiter, guided mode. Led also change its status to yellow. I waited for a long to see if it awaits for gps lock. The erro also indicates pre arm need position estimate. Is tht a problm with hardware and GPS or firmware???
Provide a .bin log where this is happening and we’ll be able to help.
If you are going to run missions and use guided mode it will be best to set FENCE_ENABLE,1 and WAIT…
You can not arm in any mode until there is a good 3D fix and Home position has been set, not even Stabilise.
It can take a while, but then you know for sure that Home is set. This gives you a good opportunity to stand around and review the planned flight and think if you’ve missed any pre-flight checks.
Check that the other Fence parameters are appropriate for you.
2 Likes
Hi shawn,
Thanks for the help. That solved my problem. I have enabled fence and the error " need position estimate" is gone.
1 Like
What does geo fence have to do with arming in Loiter mode?
I am running into this issue as well.
By default you can arm in non GPS modes without good GPS fix. Geofence requires good position estimate or it won’t let you arm in non GPS modes without GPS lock so you won’t be surprised by Guided or Loiter being denied in flight.
I disabled Geofence but still same issue “need position estimate”. This is my 7th quadcopter build and I have never encounter this issue before on any of my quadcopters.
The GPS lock is solid, 20 satellites, HDOP at 0.8.
Is the GPS update rate stable and higher than 5Hz ?
Are you surrounded by building or trees? Is your GPS can see the sky clearly ?
Yes, it is at 5Hz. should I increase that?
5Hz is fine. Does it achive that?
Yes, there are three options 5, 8, and 10Hz. I tried all no change..
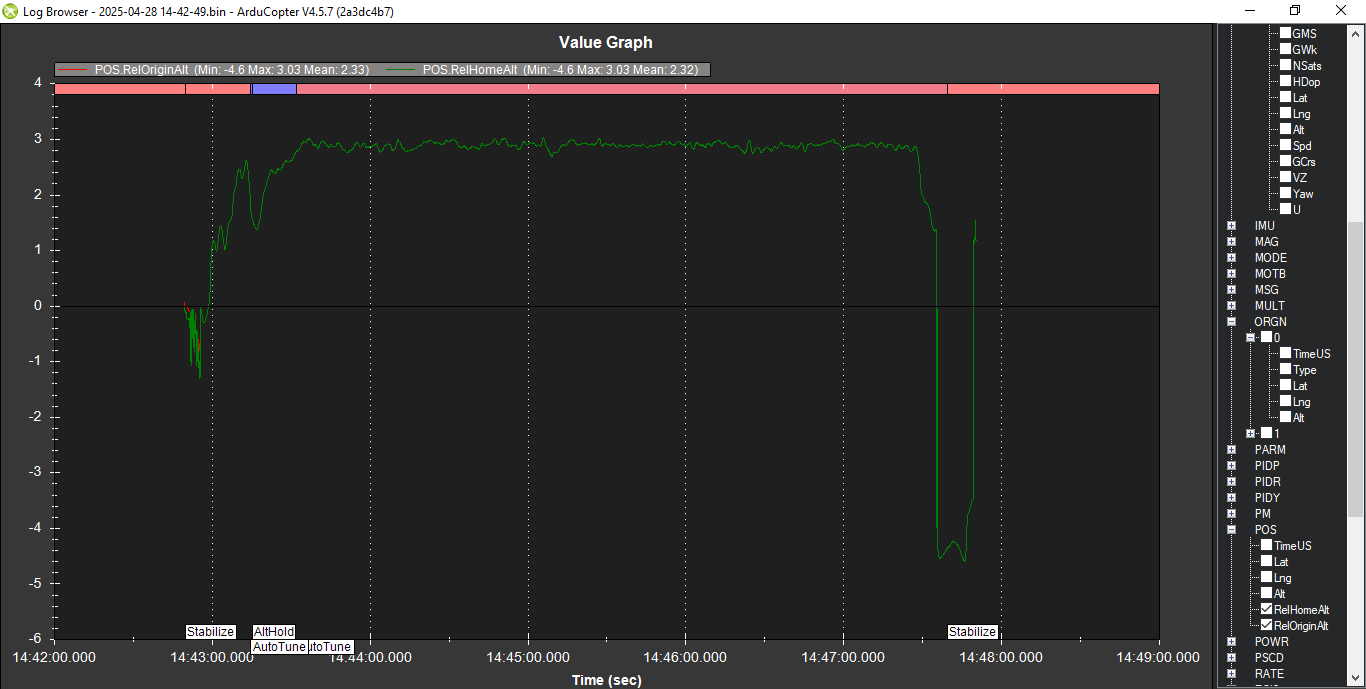
You can see in the image on the bottom that I have good HDOP and # of satellites

That is not what I said. I did not said to change the RATE parameter. I said to check in the .bin log to see if the desired GPS update rate is getting achieved.
Great HDOP and 50 satellites at 3Hz will still produce bad GPS health.
HDOP and number of satellites are irrelevant if the update rate >= 5Hz is not achieved.
No……………………
GPA>Delta
1 Like
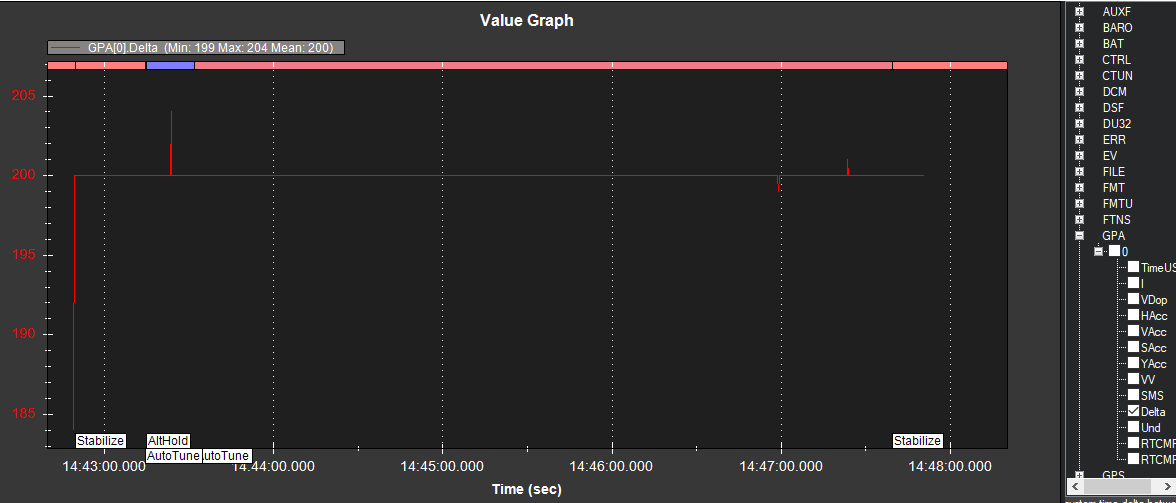
5Hz, where it should be.
That looks good, only a single spike below 200ms. So the update rate is not to blame.