No, vibrations are tricky. There’s lots of reading and lots of options.
Have you got a photo of Drone1 (overall) and the flight controller and wiring.


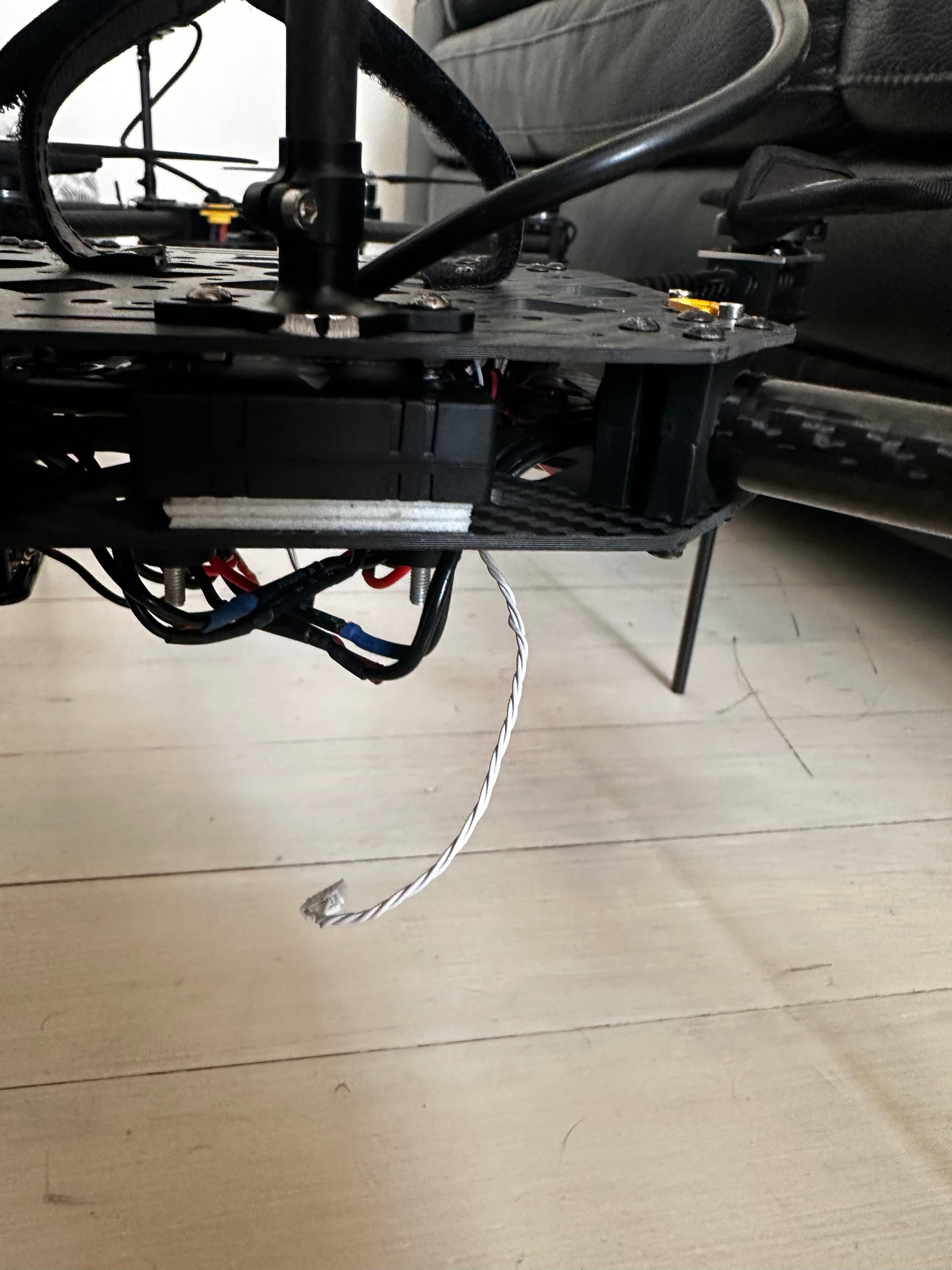
Please find 3 pictures of the drone. The FC is between the two carbon plates. I verify and nothing is touching it
That GPS wire needs to be secured to the GPS mast, then to the base plate.
Any other wiring will need similar treatment - it all has to be secured to the base plates.
Ok, I will try to do my best ! Thanks so much for your help !
Hello,
New day and new crash…
I saw the error => problems with motors but I don’t understand why… Impossible to control after the first errors ‘potentiel thrust loss’
There is no vibrations, a good fine-tuning… Do you have an idea ?
Here the log : Crash-log-drone2
Hello, Do you have an idea ?
Yes, this is the same as the original problem.
It looks like motros/ESCs are desyncing.
You can see in this pic that Motor4 is commanded to maximum - meaning it wasnt producing the required output.
Soon after Motor1 also does this, they briefly recover then Motor3 desyncs and by then Pitch and Roll control are lost and motor outputs are oscillating from max to min trying to recover stability.
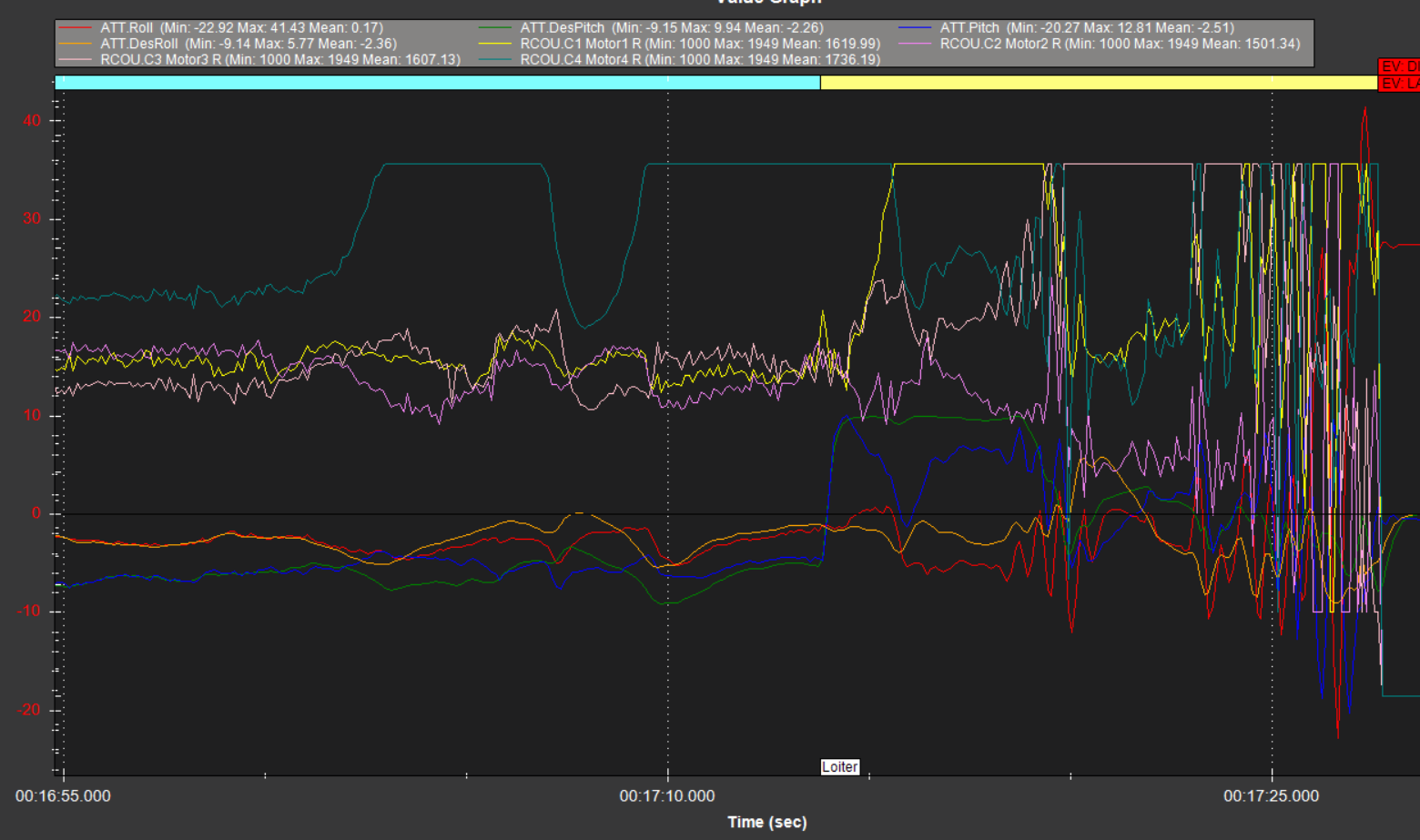
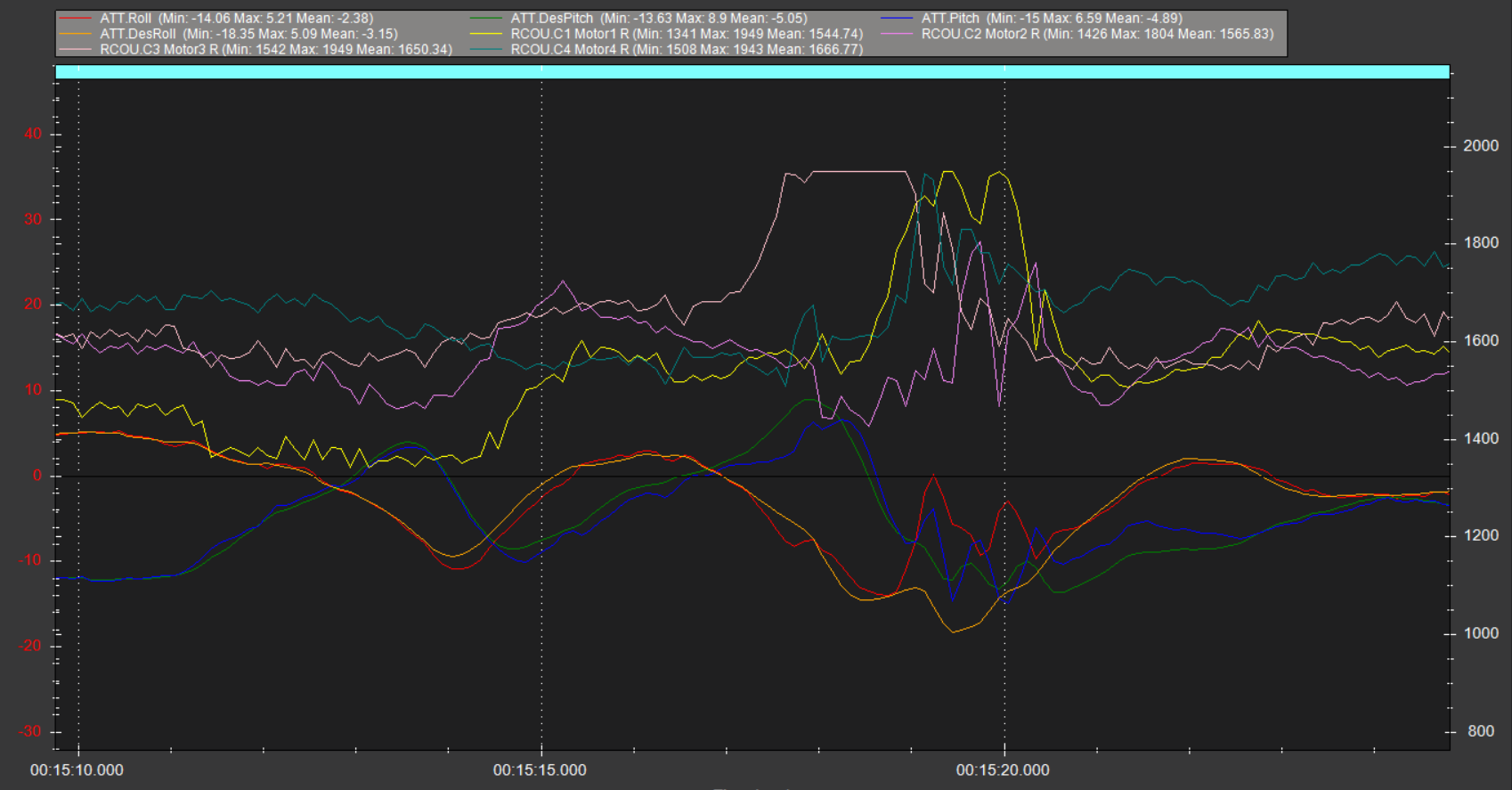
This also happened earlier in the flight but the copter recovered and it wasnt so obvious.
It could be the ESCs are not up to the job, or their low voltage cut-out is interfering.
Try disabling the low voltage cut-out in the ESCs. I think you are using a Hobbywing 4in1 ESC - Please state exactly what model ESC you have, and maybe link to it online.
If it is a BLHELI ESC so you will need some way of connecting to it with the BLHELI32 Suite and changing these settings:
- Low RPM Power Protect = OFF
- Low Voltage Protection = OFF (rely on the flight controller battery settings)
- Temperature Protection = 90
- Motor Timing = Auto
and ensure the latest firmware is installed.
While you’ve got everything apart for that, might be best to change over to using DSHOT too - there are a number of advantages.
Physically you just need to move the motor/ESC wires from “I/O PWM Output” to “FMU PWM Output” pins 1 to 4.
There’s also some other settings to change - yell out when you are ready for that.
One advantage is that you’ll have BLHELI passthrough, so you can us the BLHELI Suite without disconnecting and rewiring anything in the future.
Hello,
I use this : Hobbywing - XRotor Micro 60A 4in1 BLHeli32 - Drone-FPV-Racer.com
Well done, you’re right it is Hobbywing !
How can I modify ESC parameters ? Directly from ESC or with the FC ? I really never tune an ESC…
To set DSHOT, I can do that from the I/O Pin ?
Thank you for help !
I thinking about changing ESC to T-motor, do you have an idea of a what ESC I could use ?
That ESC should work OK.
I would load the Bi-directional DSHOT firmware for Pixhawk 6C - download the .apj file from this link, and use MissionPlanner custom firmware to install it. All your existing settings will be retained.
https://firmware.ardupilot.org/Copter/latest/Pixhawk6C-bdshot/
NOTE: this would put you on the “LATEST” firmware which is pre-stable release, but should be safe to fly, it gets extensive testing and I know of larger more expensive copters flying on this now.
The alternative is to use the normal Stable firmware (you have now) and DSHOT, but then you need to use the Telem wire from the ESC to a spare serial port RX pin on the Pixhawk, and a few extra settings. This is not hard to do but there is a tiny bit more wiring if you are up for it. Let me know if you want to go with the “Stable” method. This actually gives you more ESC data, but is slightly harder to wire up.
Physically change the 4 ESC wires to the FMU outputs.
Then use the Servo output screen in MissionPlanner (Setup , Mandatory, Servo Output) to move the motor functions:
- Motor1 from Servo1 to Servo9
- Motor2 from Servo2 to Servo10
- and so on…
Now go to full parameter list and set these parameters:
INS_HNTCH_BW,25
INS_HNTCH_FREQ,50
INS_HNTCH_FM_RAT,1
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
INS_HNTCH_OPTS,2
MOT_PWM_TYPE,6
SERVO_BLH_AUTO,1
SERVO_DSHOT_ESC,1
SERVO_BLH_BDMASK,3840 // only available with bi-directional DSHOT
Now you should be able to use BLHELI32 Suite to connect to the ESCs through the Pixhawk. In BLHELI Suite select the betaflight passthrough interface, and I think 115200 baud rate.