Hello,
Today I was flying a test mission on my quad with Ardcopter 4.5.7 loaded on Cube pilot. In between the mission flight I saw that the quad deviated from its mission path and then came back. I did not see any error on the Mission planner. But it didn’t follow the intended track. When I plotted Desired vs Actual Yaw, I found them to be matching perfectly. I couldn’t understand why autopilot would ask for Yaw when there was no need for it.
Please find the enclosed bin and tlog file for this flight in the link below.
Please help me investigate this issue.
Check your mission logic, it appears to have done exactly what you asked it to
So your mission is to fly to 14 waypoints, then return to the first waypoint and repeat 5 times. So you complete “Mission Item 16” then jump back to “Mission Item 3”, which is the back corner of your grid.
Does this explain the behavior you saw?
Edit:
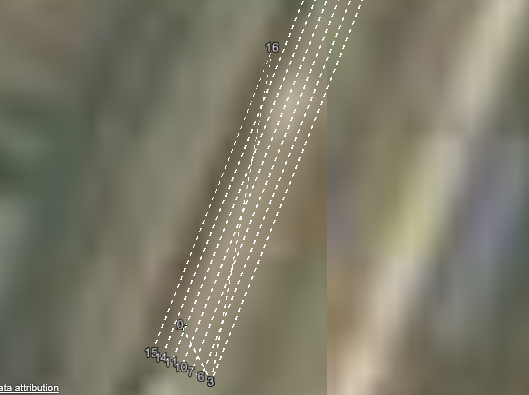
In plotbeta.ardupilot.org you can kinda see your waypoint mission set, where 16 is partway through your run, and then you jump back to 3. Seems like that is where the craft was headed.
1 Like
Thank you Joshua for putting in the time to go through the log.
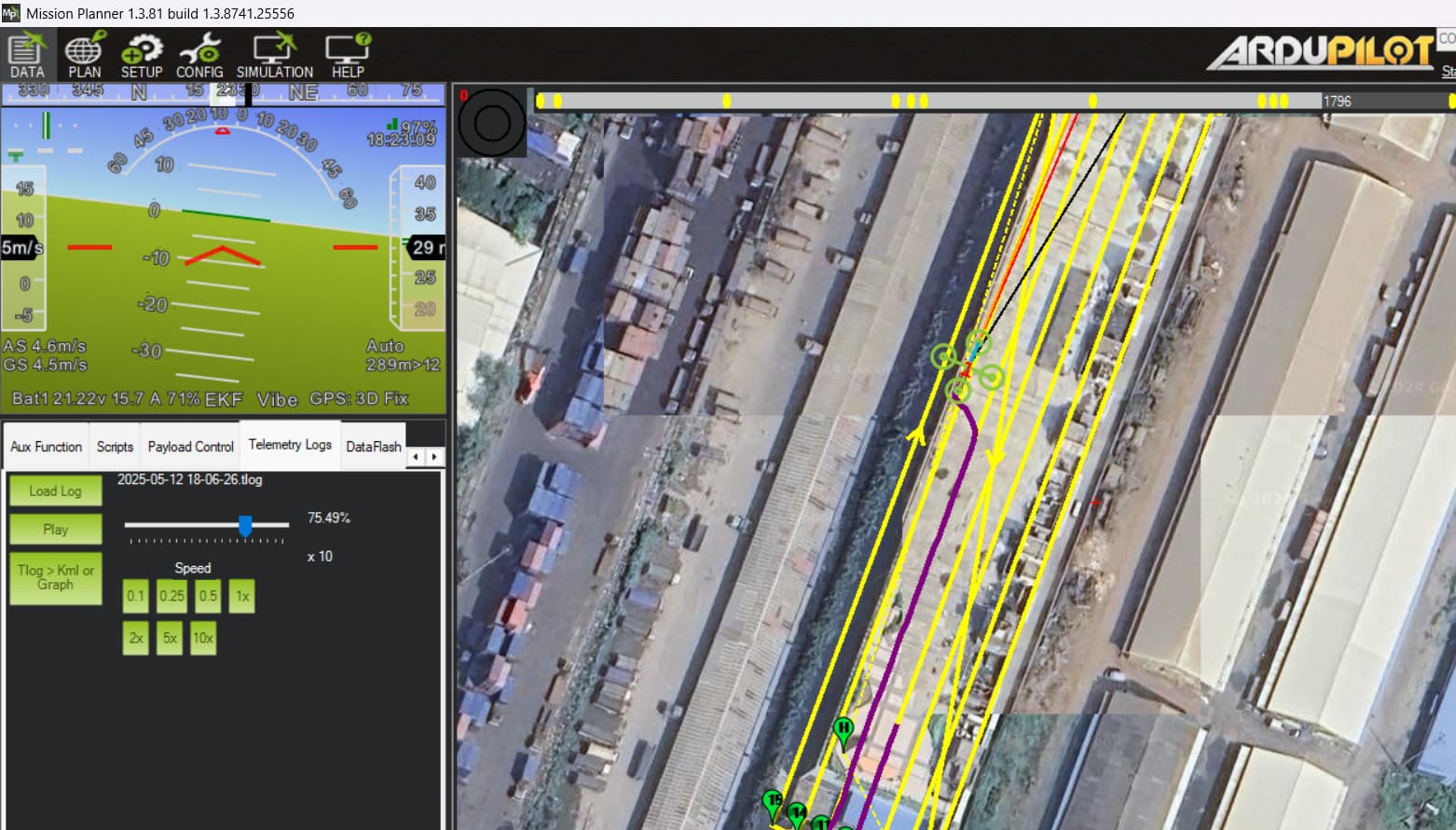
Please check between WP 11 and 12. There is a slight drift as shown in the image above and then it tries to come back to the original path.
My mistake, I see it now.
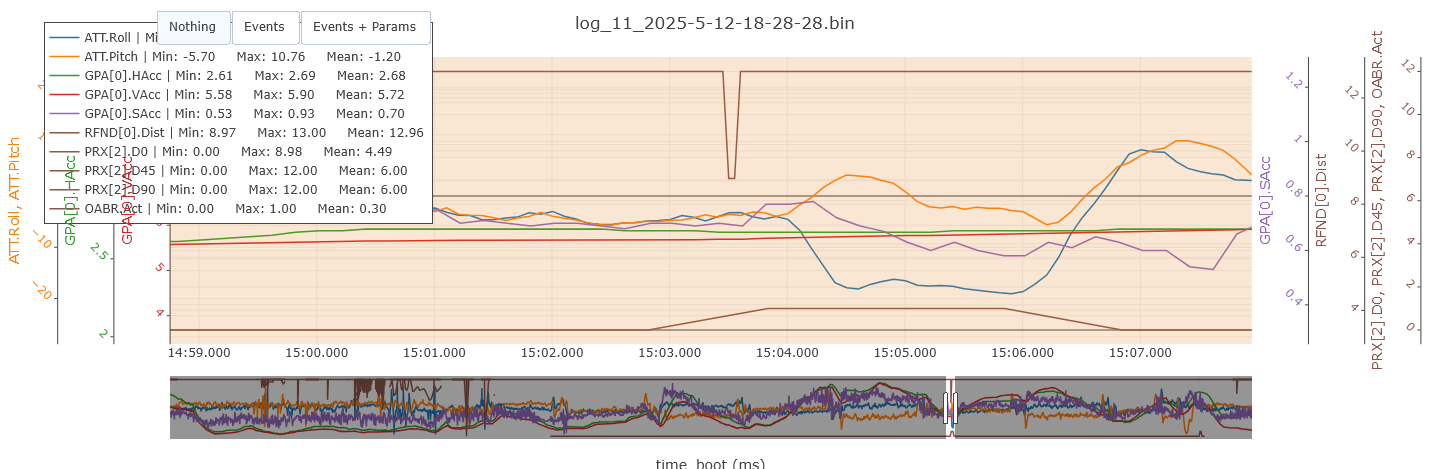
Obstacle Avoidance was triggered on something in front of you.
consult this link, since that is what you’re using, and, if using Mission Planner, there’s a Proximity view in the Ctrl-F menu that will give you a live view of those sensors.
I noticed that your proximity action was set to “stop” but I get the impression that BendyRuler is overriding that, you might want to check your configuration
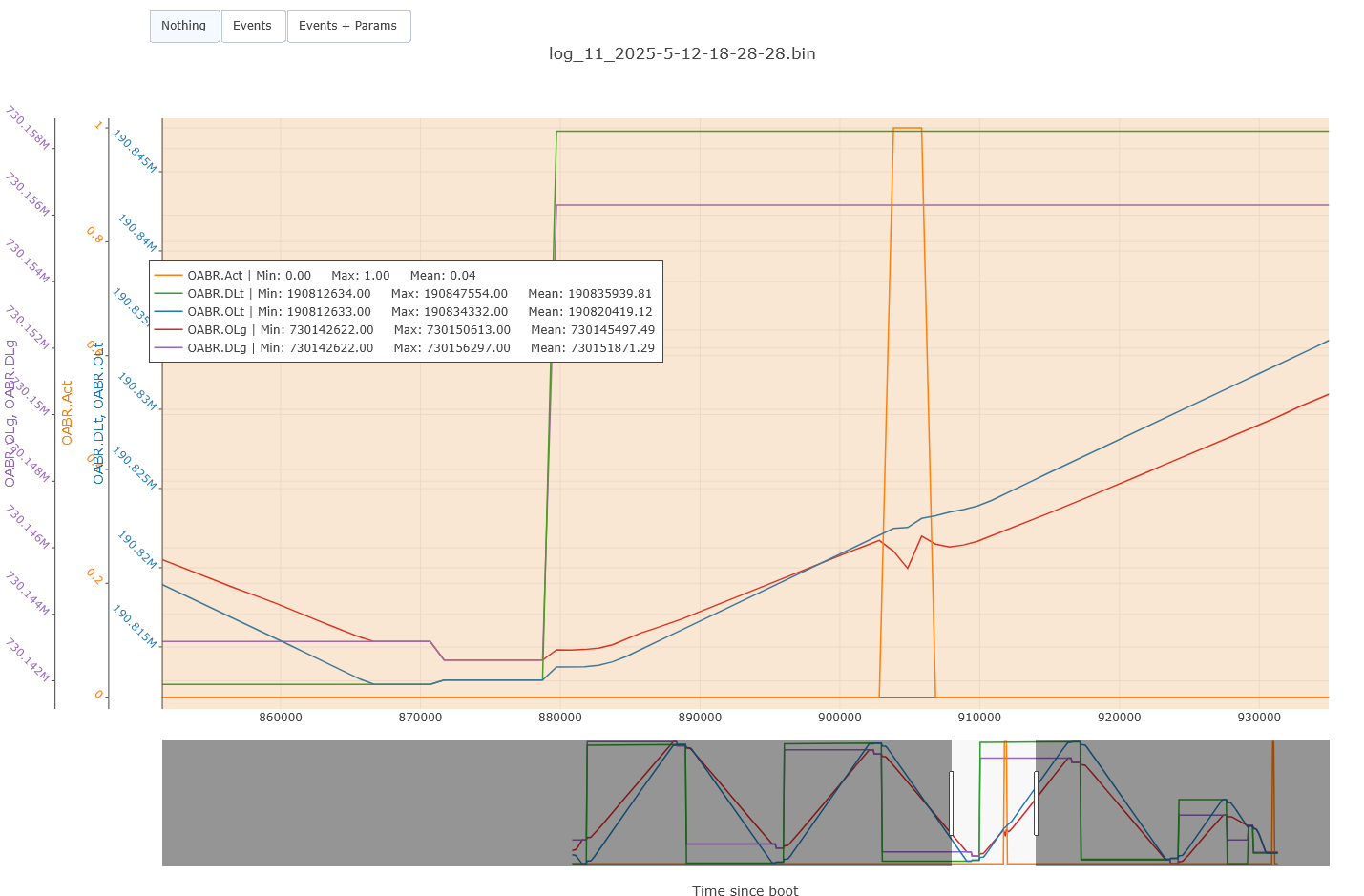
Edit: A better plot