Today after flying around in stabilize i switched to pos hold and contiued flight. after about a minute without any action the motors stopped and copter started falling. I pushed up throttle stick to the max and copter managed to stabilize again and i was able to land. Log shows nothing that could explain this behaviour, but you can clearly see the throttle drop.
Setup:
Frame: 3dr Y6b
Motors: Emax 3506 650KV
Props: T-Style 14 x 4.8
ESC: Afro slim 20A BLHELI-flashed
Batt: Multistar 10Ah 10c 4s
FC: PixLite with Neo M8N (Drotek), AC 3.4 RC2
RC: Graupner MX16 Hott with GR16
Telem.: 433 Mhz SiK
AUW: 2550 g
Log: here
Hubertus,
Your vibration levels are way too high with some clipping occurring. Are you hard mounting pixlite?
If not, you should consider improving the vibration dumping to bring those levels down to something less than 10 ( at least ), The less, the better.
Fernando,
pixlite is very soft mounted - vibration levels are within recommended range and the clipping occured while the copter was falling.
In the Log there is a strange behaviour of the DAlt-Value. It looks like it is equal to the measured Alt for a short period just while the copter dropped.
Nevertheless I will try to balance the new props to keep the vibes low.
Hi Hubertus,
This is an interesting and tricky problem you have here.
So the problem is you have a strong roll oscillation. It is only the advanced motor mixing in Arducopter that has stopped your copter from taking off like a rocket.
So what has happened is your copter was sitting very still with your throttle output set to zero. Your throttle was at zero because the roll oscillation was enough on it’s own to keep it airborne. This made your copter think it had landed. The copter then took all motors to zero and the copter then started to fall. You then raised the throttle and the copter then takes off again and starts flying.
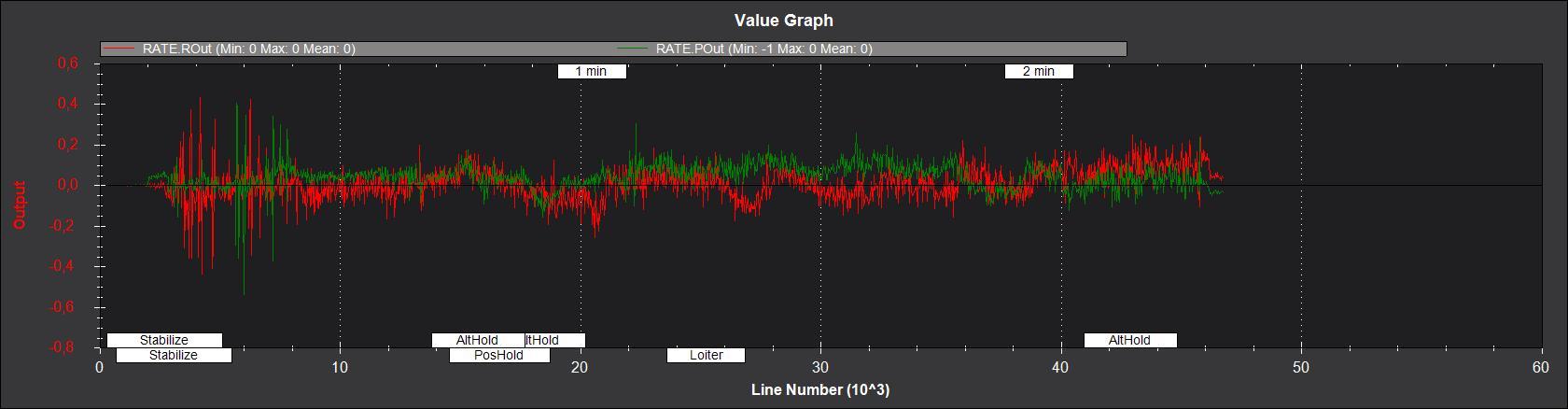
So drop your roll PIDS down to or below your pitch pids and have a look at the RATE.ROut POut and YOut in the log. You should see that in this log the ROut is very large. You want it to look more like your POut. You should also see your RCout logs be much less noisy.
Leonard and Hubertus,
The overcharged pids better explains the issue. My mistake I just stopped the analysis after seeing the high vibrations - I’ve have had issues with vibrations over 7, so for me it looks pretty high.
However it has brought me another question? Does the high PID, witch causes vibrations a lot, is the responsible for the high vibrations3.3 ? An oscillation caused by overcorrection by the autopilot itself ( even under the circumstances ) is interpreted as vibration?
Hi tabascoz,
Yeh anything shaking the copter will show up in the vibration logs. How strongly it shows up is dependent on where the sensor is relative to the CG of the airframe. So it is possible that you could have the cg perfectly on the sensor. That would mean you would only see the vibrations caused by a roll ocilation in the rate logs but not in the acceleration logs. Since the vibration logging is done on the accelerometers only it that log may not show it.
Leonardt and Fernando,
thank you for showing me the reason for the strange behaviour. I reduced Roll PIDs as You recommended (by 50%), but the roll oscillations are still there. Can you give a suggestion for the range and how I can reduce oscillations?
With lower PIDs the Copter becomes very sluggish.
Hubertus
Humbertus,
I’m not an expert ( first of all  , but my suggestion would be to lower D term a little bit or do a inflight tune with ch6 knob. with max/min of 0.01 and 0.001.
, but my suggestion would be to lower D term a little bit or do a inflight tune with ch6 knob. with max/min of 0.01 and 0.001.
See if that helps,