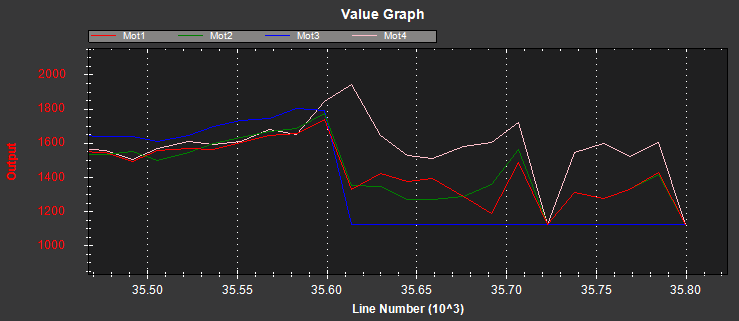
Seems problem in mot3 but why 1100 is a minimal and in what units?
What could this mean?
All motors and ESC’s woks well on ground and provide same thrust.
APM motor pinout’s seems well soldering too.
Here is my dataflash log: [attachment=0]2014-04-12 11-53-08.zip[/attachment]
Looks more that Mot4 had problem and it compensate that with dropping throttle from mot3 and adding it to mot4. mot4 is CW so maybe your propeller loosed?
This couldn’t be exclusively the stability patch bug. The point in the log where all the motors hit minimum is caused by the bug, but the crash itself is hardware (mot 4, as stated above by someone else)
The units are pulse widths in microseconds. Read up on servo signals to learn more