Pixracer running 3.5.5 in modified F450 with custom CF arms (515mm now rather than 450)
External GPS + compass
Sunnysky 2212 980 with APC MR 10x4.5
5200 3S LiHV 10C
Hobbywing Platinum Pro 30A ESC’s
AUW 1239g
After initial maiden flight performed a successful auto-tune then tried some fast runs in position hold to ‘get the feel’ of the quad.
On three separate occasions at the end of a run, whilst turning, the quad gained altitude very quickly, when I centered the sticks the quad hovered fine.
From the RCOUT’s it would appear the motors were at near maximum.
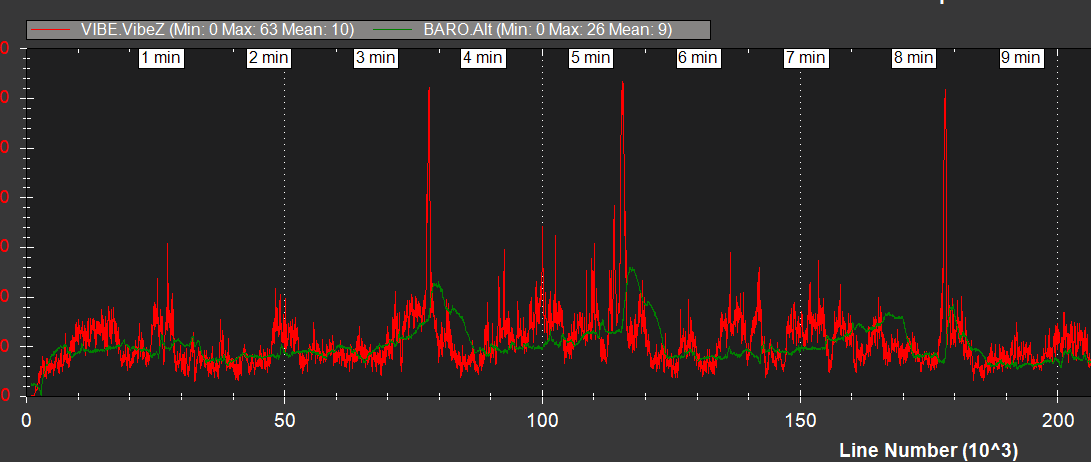
I see sharp spikes in the Z axis just prior to the altitude gain,not sure what caused it but have re-built the machine and paid attention to anything which may have been loose or ‘flapping about’
Will try again this evening and report back.
Thanks for the help with this, previously had only checked the x, y and z in the IMU listing in the log and everything looked fine.