Hi Dougie,
Looking at the log around the time of the crash event suggests that the GPS speed drops off from 16 to 10m/s, and altitude drops - the RCIN and RCOUT shows discrepancies - which can be the case with FBWA - the RC inputs are still being processed, its not a direct passthrough mode. I also have to assume that you use the standard channel mapping of:
- Roll stick should control channel 1
- Pitch stick should control channel 2
- Throttle stick should control channel 3
- Yaw stick should control channel 4
And that you have correctly calibrated your radio system and airspeed sensor.
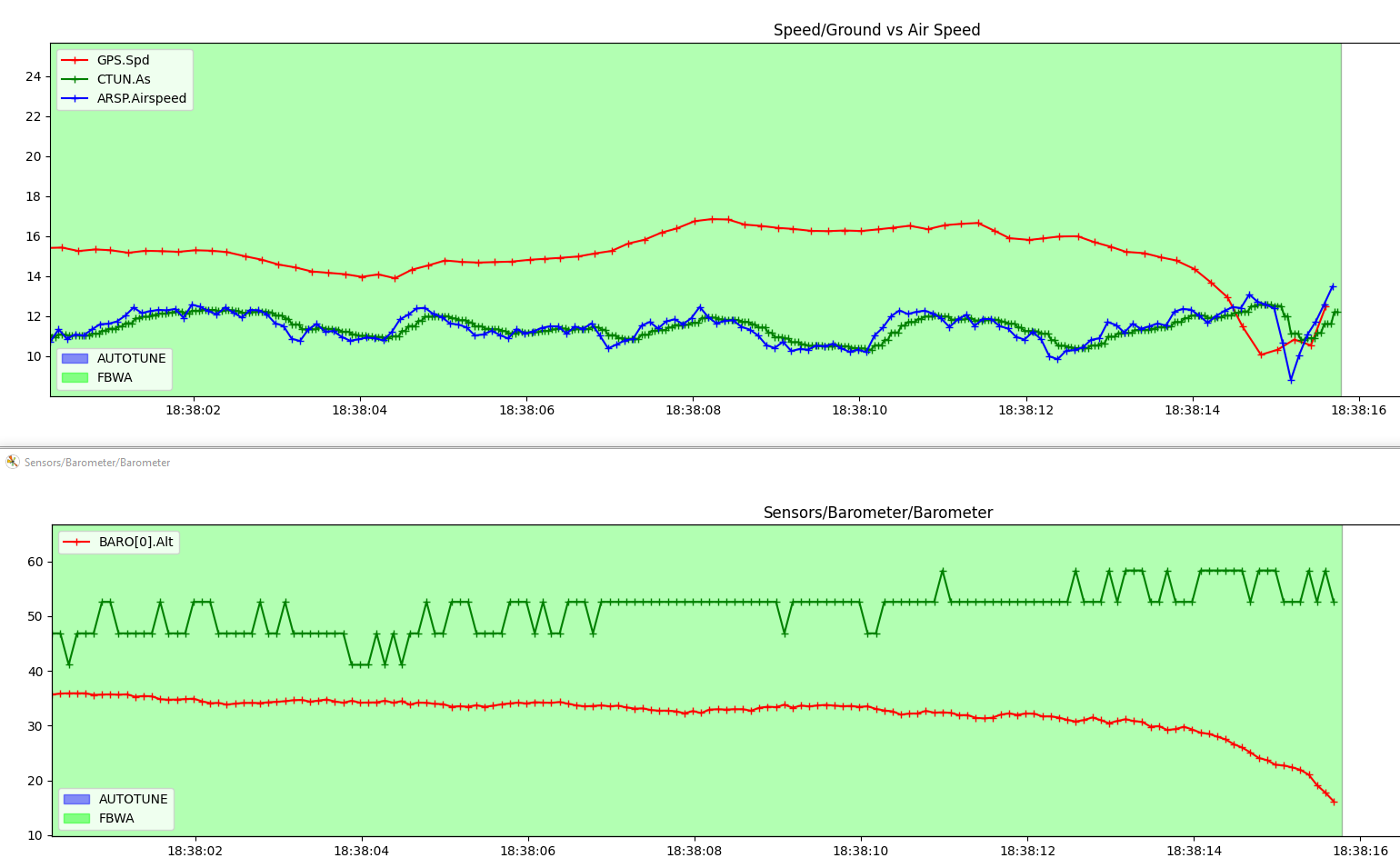
Here are some graphs of the data leading up to and including the crash event.
First thing I note is that the GPS speed drops but the airspeed sensor speed increases. I tend to believe GPS speed more than airspeed, but what is shown here is that the GPS represents ground speed and the airspeed sensor obviously represents airspeed. The two are usually not the same. Related to this, altitude is not maintained for a time period before the roll event and then through the event. Airspeed would increase and groundspeed potentially decrease with a high nose down pitch.
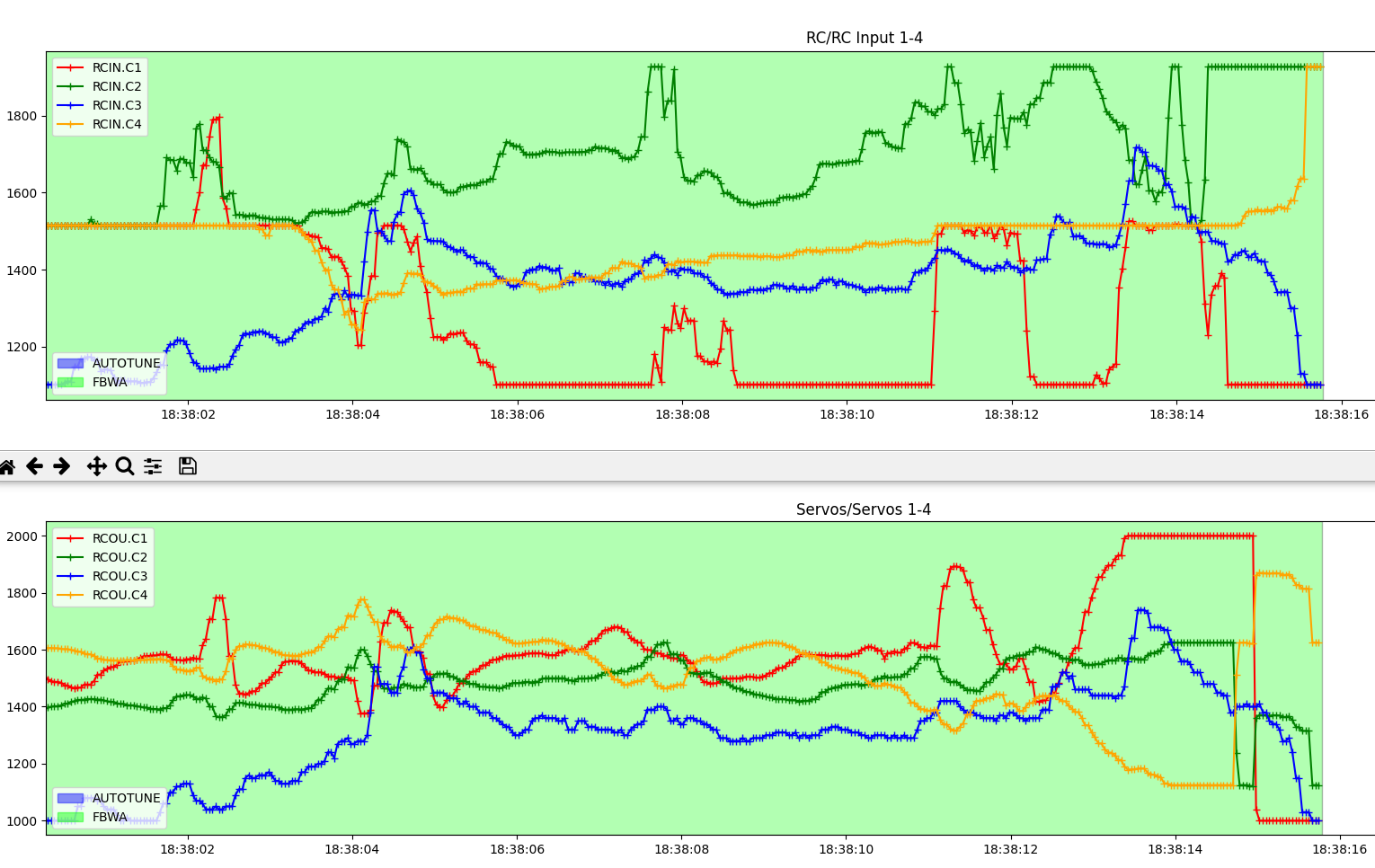
I included the RCIN and RCOUT plots to see what you asked for and what the autopilot sent out. RCIN asks for throttle up and this is represented in the RCOUT, so you are asking for more throttle whilst the aircraft is descending and this is passed on by the autopilot - but you don’t go above around 75% throttle. You are asking for a lot of pitch (channel 2) and are not getting it - you max the pitch channel on RCIN but RCOUT shows not much in the way of pitch command at all. The autopilot is also asking for increasing amounts of yaw which, with a V-tail will be using up some control throw (yaw pitch mix?). Note the increasing offset on roll for RCIN - for neutral stick roll should be around 1500, which it is and then starts reducing towards 1000 (which is full roll one way) and then there are some opposite roll inputs. This is most odd to me. The autopilot tends to deal with the roll offset ok but does respond to the last two roll inputs - maxxing out roll in the opposite direction.
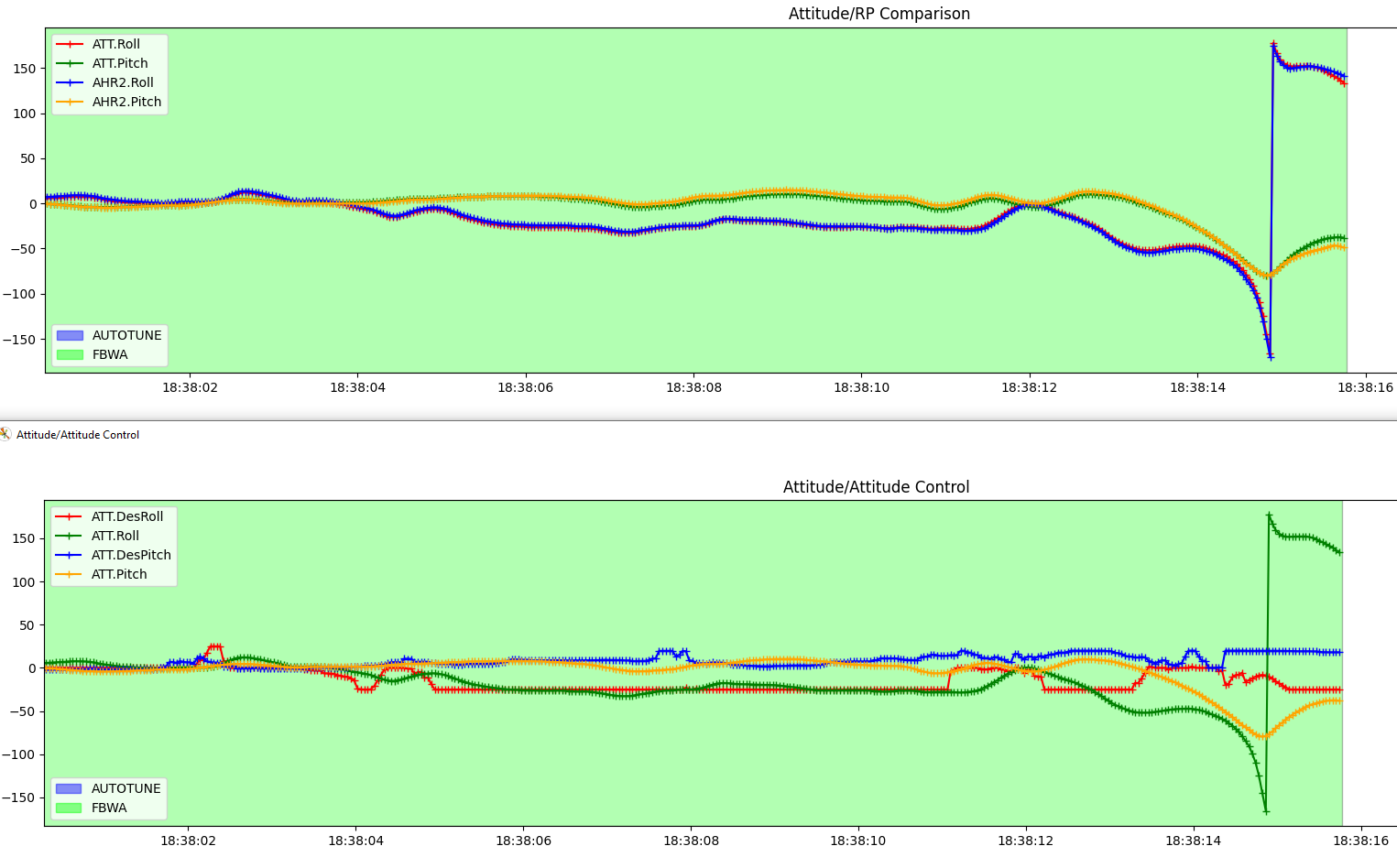
The internal estimations seem to be performing alright from Attitude/RP Comparison chart.
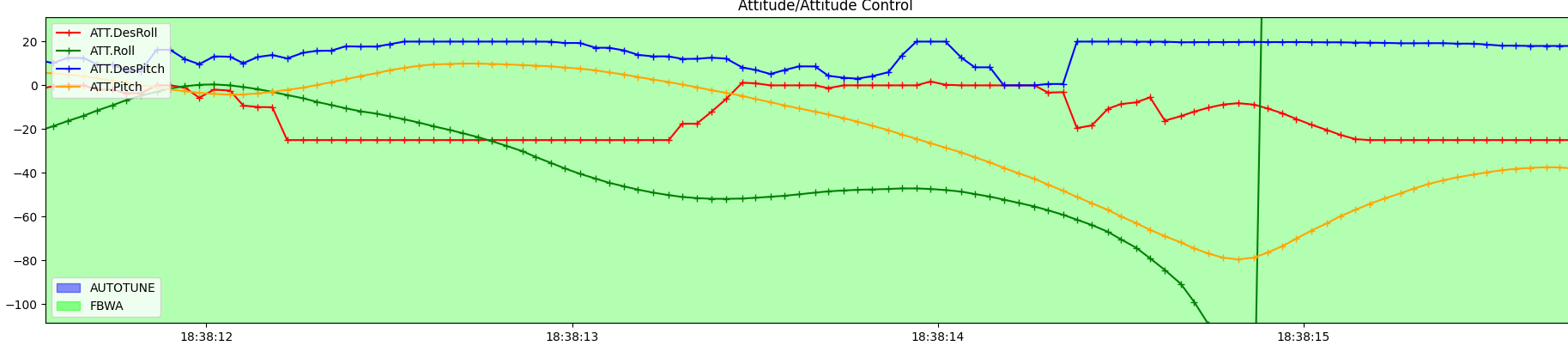
The last two charts display a comparison of desired roll and pitch against measured roll and pitch. The second graph is a zoom in around the crash event to get a better idea of the angles attained.
Both pitch and roll become increasingly divergent which suggests the aircraft was busy doing its own thing and not responding to the autopilot commands. Also if the units of this chart are degrees then some relatively large attitudes were being asked for and not being achieved.
If you weren’t asking for roll or pitch inputs at this time, I think there was a problem with RCIN - where that problem is, I don’t know.
It would be good to have a ‘direct’ control mode to change to here. This is a direct passthrough of commands from transmitter to servo/esc. The aircraft you were flying should be conventionally stable and be able to be flown in direct mode easily - in fact I would do that first if you repair the aircraft so that you can understand the aircraft behaviours (for example learning how and when it stalls without the autopilot interjecting).
Others may be able to comment more on your settings/params or may have a different opinion. Interested to read alternative explanations.