Hey guys , so today my Tarot Hexacopter was flying a mission when suddenly it began descending without any warning. The log did not show any error message , but im not very wise on log analysis.
Im using:
APM 2.6
2x 16000 Mah batteries
RC Timer Gimbal GBM5010
Power Distributor board HK
MultiStar 4014 320 x6 Motors
I dont know what else would you guys need to help me solve this, When I checked the batteries (after climbing a tree to retrieve the Hexa) both batteries where over 16000MAh still, when fully charged they are on 16.4A.
I’d appreciate a lot if you guys could point me in the right direction.
Thanks a lot in advance.
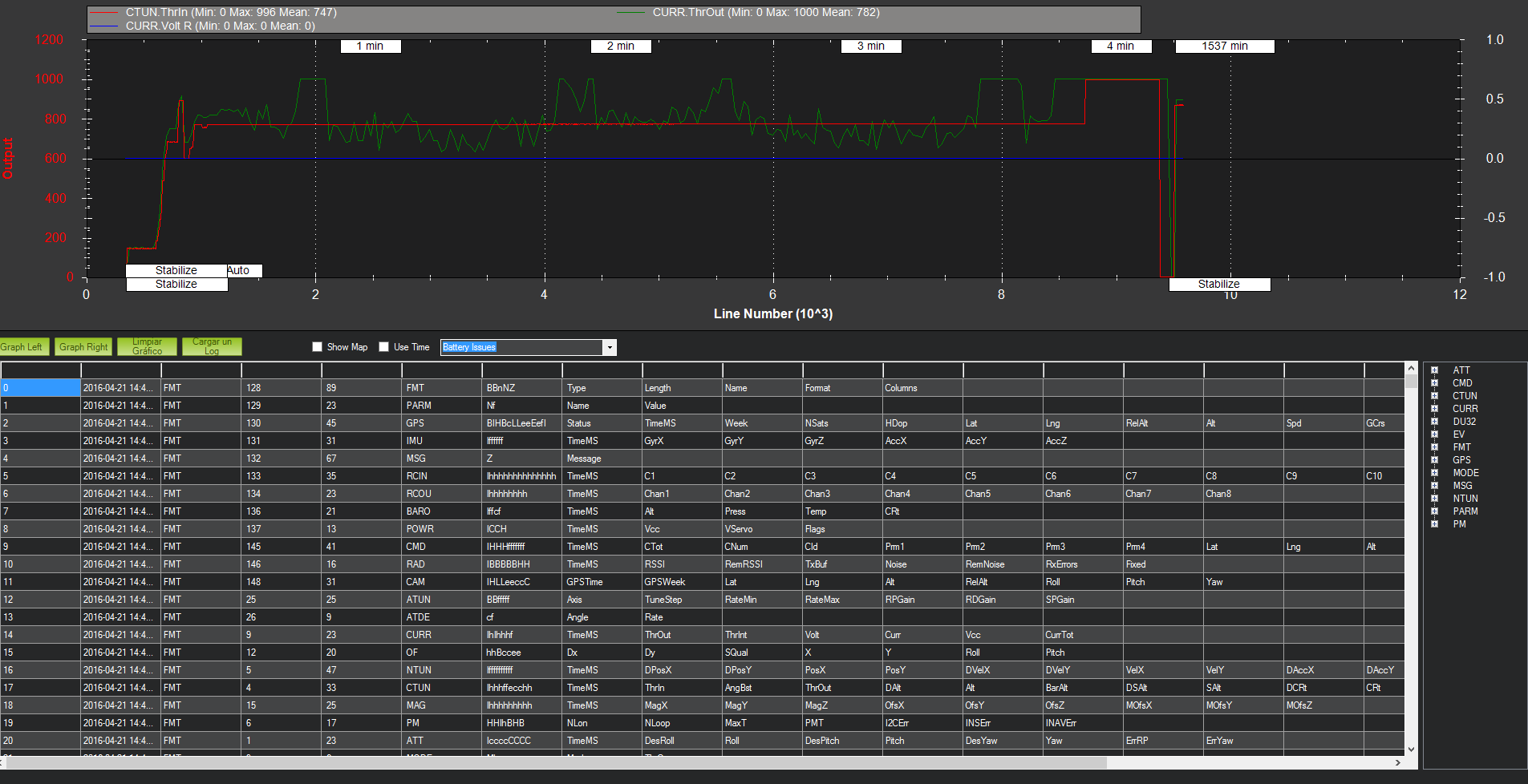
Logging set to low to see everything. You can see that desired altitude is higher than altitude so the copter is not holding altitude. Throttle out goes to max and still the copter is falling.
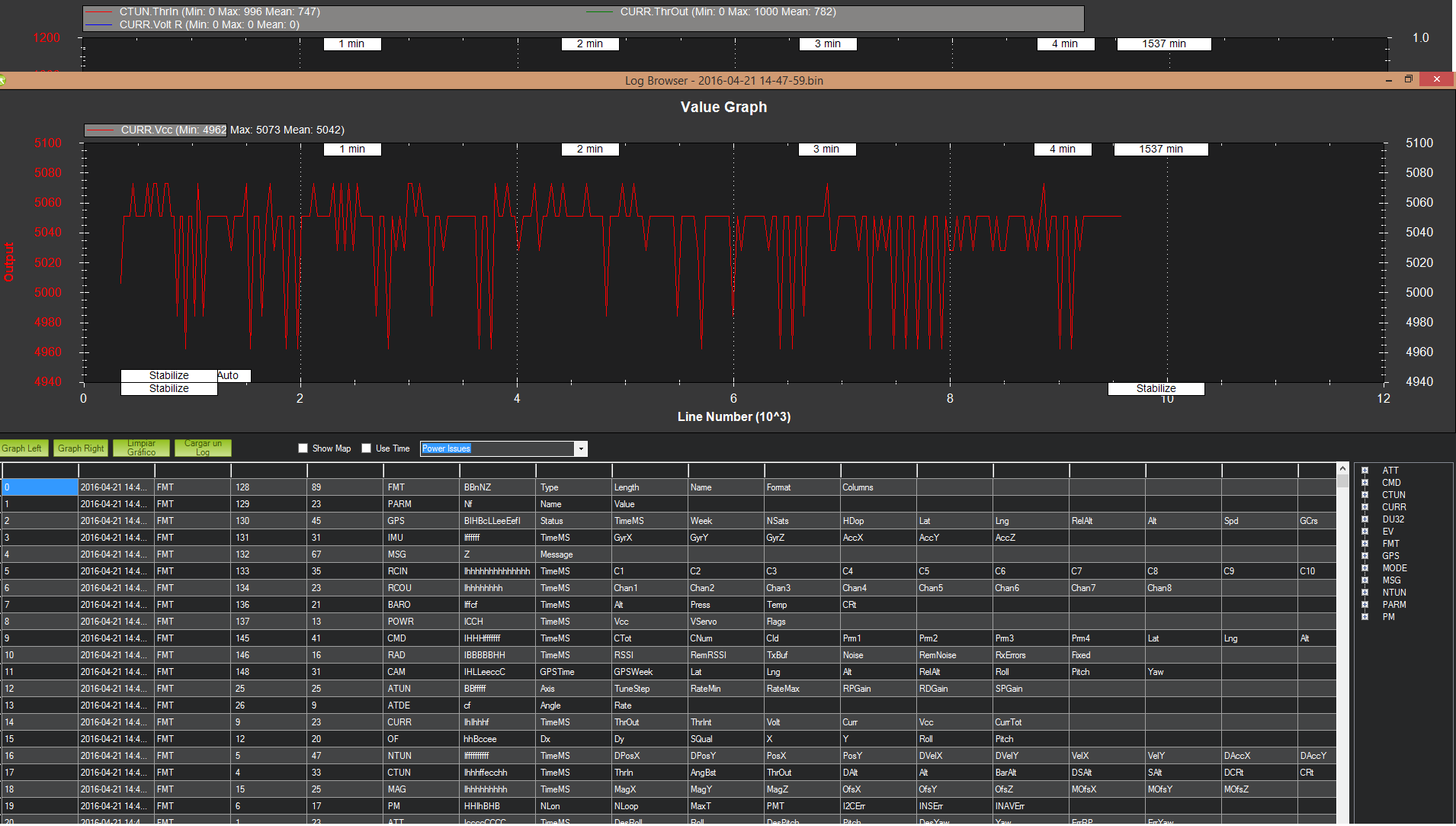
Since you don’t have a battery monitor we can only speculate that the copter ran out of power.
Hey iseries, thanks for the reply. The thing is that although I don’t have battery monitor, when I retrieve the drone from a tree I checked both batteries, they where full,the drone flew like 4 minutes before the event.
I think I’ve trace the problem to failsafe bad configuration. As I didn’t have any apm failsafe there was an in-flight loss of TX and the failsafe of the receiver kicked in( crappy orange r615), failsafe might have maintained the position of throttle on which it was first binded with,low throttle on GPS control.
But I haven’t had time to test this, I keep thinking how to recreate the event without putting the drone at risk, lucky me the drone landed “safely”
Well even though the batteries were full the copter could be just to heavy to keep it in the air. As the battery voltage drops the ability of the motors to keep it in the air drops. With the two batteries you have it is quite heavy.
The voltage of the batteries with no load are going to show as full even though they are not.
Really would be nice to have a battery monitor for this.
This can happen with either old batteries or low C rating batteries. The voltage drops in either case quite abruptly to below the low voltage threshold defined on the parameters and the failsafe is triggered.
I have some old batteries that behave exactly like this. There’s a workaround (cheating). I connect several car headlight lamps (55W each) to simulate the required amperage (my case 50A) and check the voltage of the battery (here the drop is from 4.2 unloaded to 3.3 with a 50A load), so I set the voltage threshold to 3.1V per cell. It’s risky and might bring other problems, but while the slow boat from China does not deliver new batteries allows me to test ArduCopter.
I do this because I noticed the behavior with a battery monitor. Check the wiki for some excellent options.