Hello.
I wanted to know your opinion.
Cube with 4.03 arducopter.
After taking of, drone suddenly goes to the left. There is no GPS error, no glitch in logs, nothing.
Can you please tell me what started this drift?
If anyone interested why RCIN channel looks the way it looks. At the begining, the PPM signal is being generated by a computer, later i switched to RC transmitter (you can see really fast big change in logs.)
What started the drift in the first place?
Logs here:
https://drive.google.com/drive/folders/1miYQb8t-I0dI2yY_eaKhYdvjM4vqK5qH?usp=sharing
did you completed radio control calibration ?
Ch1 is must be at 1500 when you release roll stick but in your log its at 1700

also there is no takeoff throttle up in your log!
Well. you misread something. in my configuration CH1 is throttle channel. Thats why it goes to 1700 after arming, so it imidiately takes off. And it works. In my configurations roll and pitch are channel 2 and 3 (i dont know in what order right now) So it behaves how it should .
I should mention that this configuration worked multiple times without problem. And that whats interesting because (as you can see now) roll and pitch are at 1500, yet it went to the left couple of meters (maybe 5) right after start. But there is no GPS glitch in logs.
ok
i wasn’t check your rcmaping
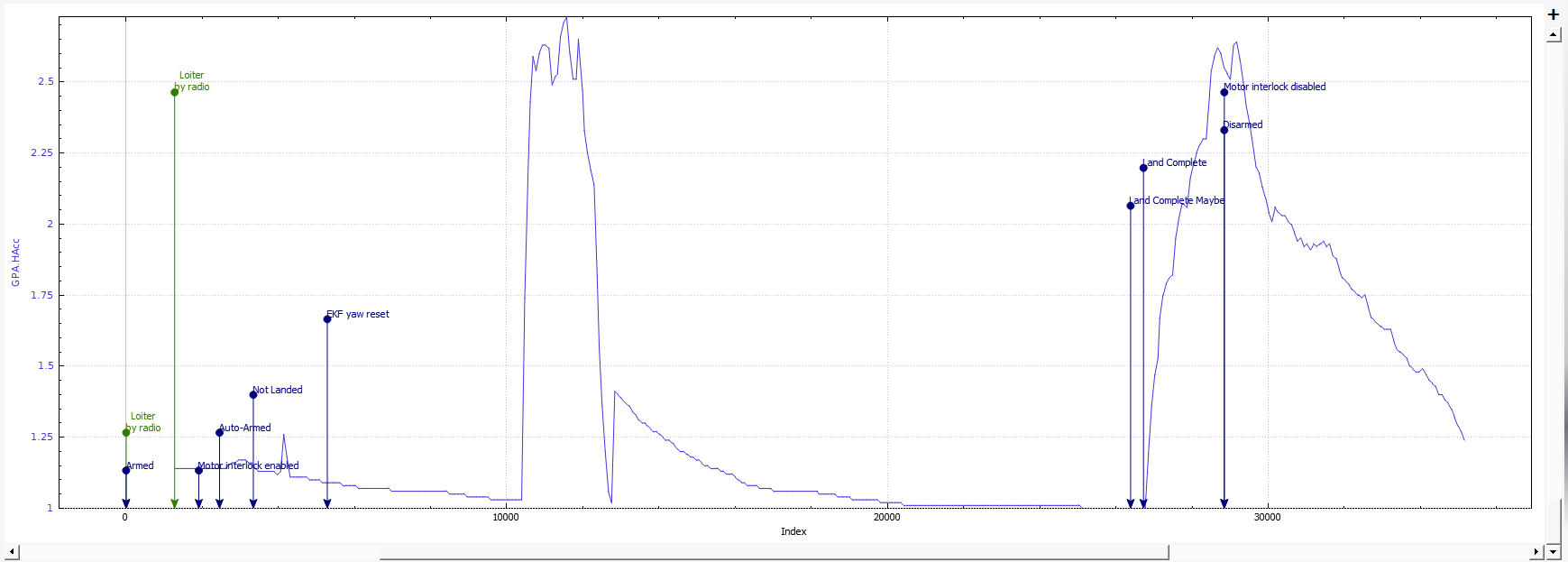
according to GPS data , horizontal accuracy was at min 1m and max 2.5m
if copter moving 5 meter then stops, it could because of GPS accuracy but if its not stopping there must be another problem
2 Likes
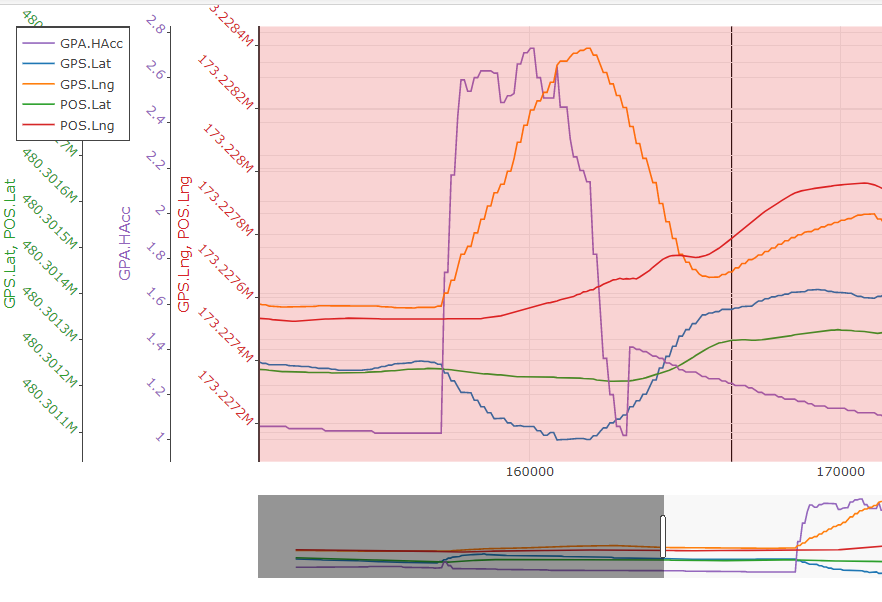
Hosein is right it was a GPS glitch. The same time when GPS Hacc went up, the gps position moved, and copter position estimate started to diverge since the IMU does not underpin the movement… and copter started to follow gps coordinate changes.
1 Like
Hello. Thank you very much fór your help. I was just about to mount second GPS. So if i undertand correctly, that should reduce the chance of gps glitches. Once again, thank you very much.