I am building a quadcopter to fly indoors with T265 and Garmin Lidar Lite V3 rangefinder.
This was a test run without auto tuning the quadcopter.
I have set default altitude, take off altitude and waypoint altitude to 1 meter while creating a mission using mission planner. However, when I arm the quad and switch it to AUTO mode: it takes off to the moon.
I would like to know why, and any additional parameters I may need to set for the mission to use the altitude.
The quadcopter works fine in altitude hold mode. Rangefinder detects the range accurately, and is able to hold altitude. (Checked the sonar range in Status tab).
Rangefinder setup facing downwards.
T265 tracking is working fine (confidence HIGH and tested with Althold, Loiter)
Missions with GPS work fine with rangefinder.
Arducopter version: 4.3.7
EK3 params:
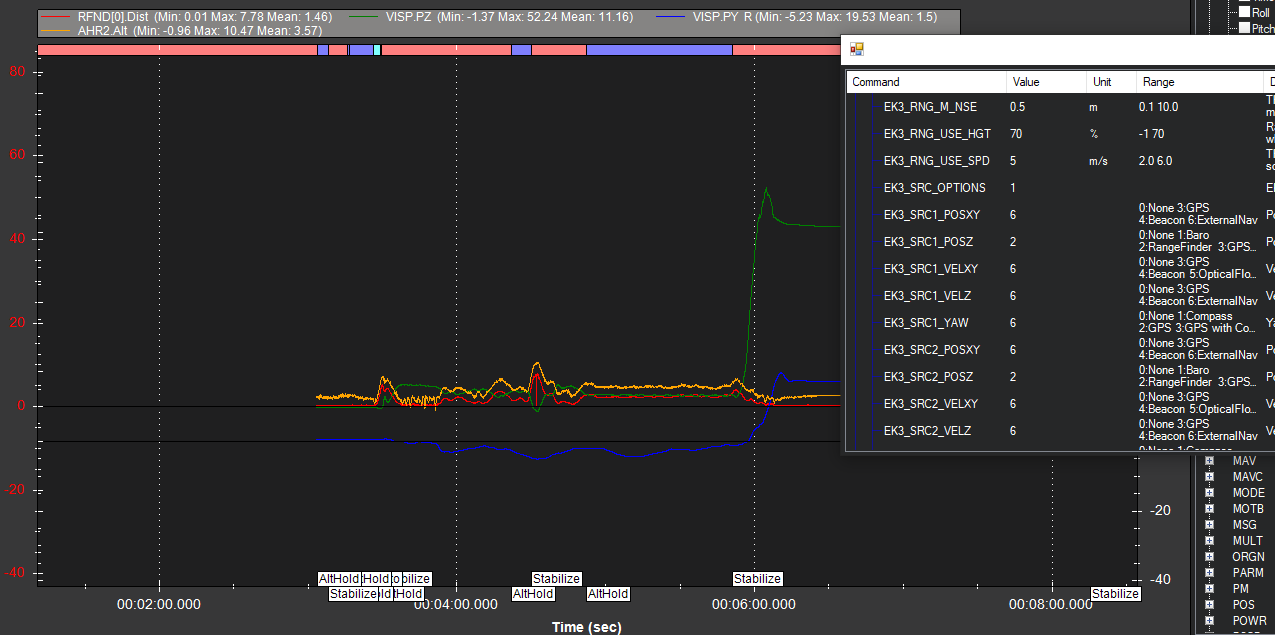
SRC1_POSZ: rangefinder
SRC1_VELZ: external nav
SRC1_POSXY: external nav
SRC1_VELXY: external nav
SRC1_YAW: compass
The Rangefinder is spitting wrong readings (see in middle of picture)
I would recommand you disable the velocity z (0)
There is obviously a jump int the T265 estimation at 06:00 mins == make sure you reduce vibration to minimum
Thank your for the response.
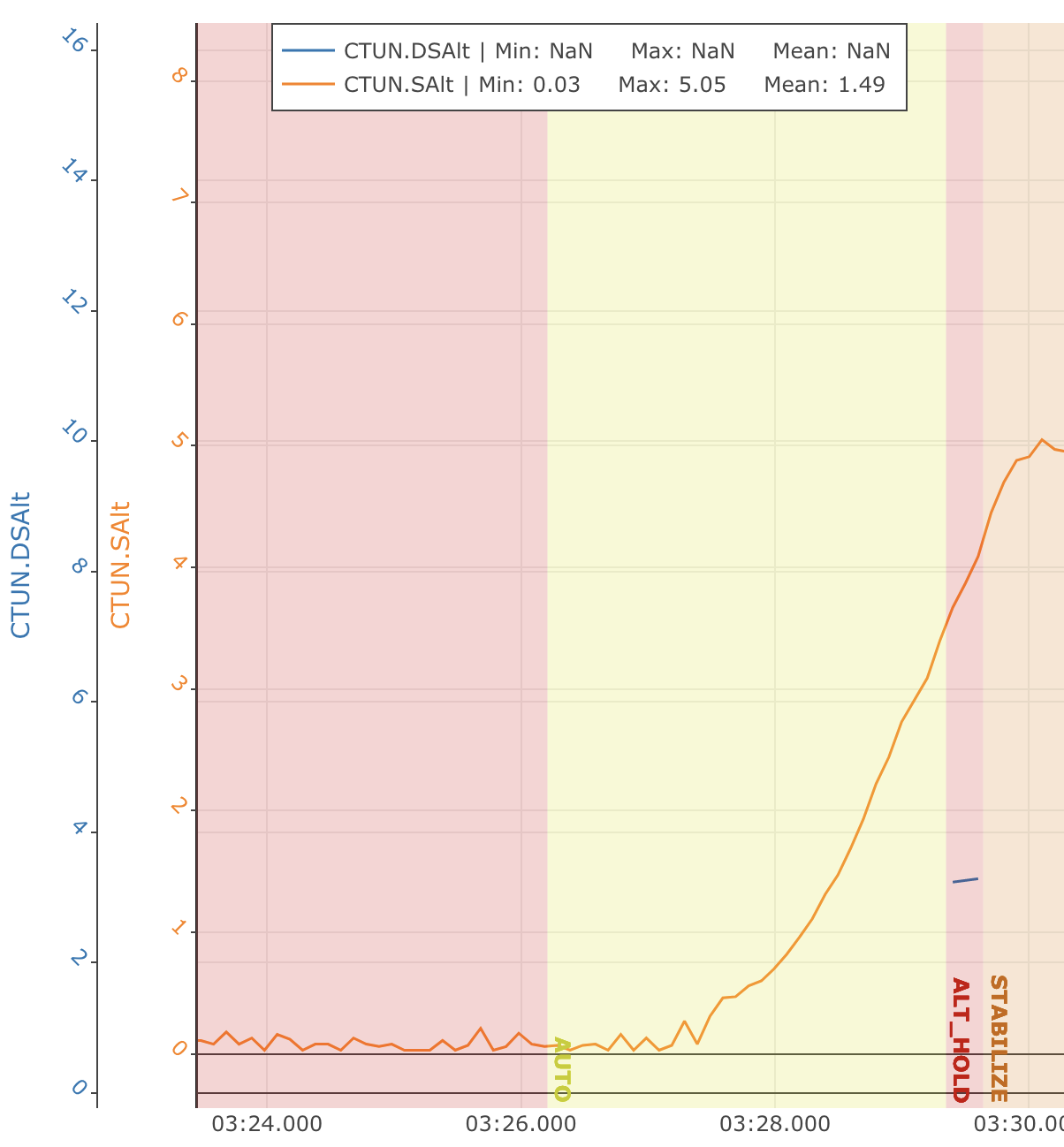
AUTO is between 3:26 to 3:29 as seen in attached screenshot (since it took off to a high altitude, I switched to stabilize).
I am currently tuning the quadcopter, will test again this weekend.
I needed one clarification: When we use ALT HOLD mode with rangefinder, I am able to see DSALT - Desired rangefinder altitude, set to a constant value (as it should be. visible between 4:50 to 5:50).
But when trying to fly a mission in AUTO - I do not see DSALT value set to any number. Why would this be the case?
I have started reading the developer guide to get better understanding, meanwhile if you can help me with any pointers - that would be helpful.