running arducopter 4.4.4 on octorotor/X with Hobbywing propulsion system 14s powered battery.
i have configured harmonic notch filter and followed all initial tuning parameter set to start with .
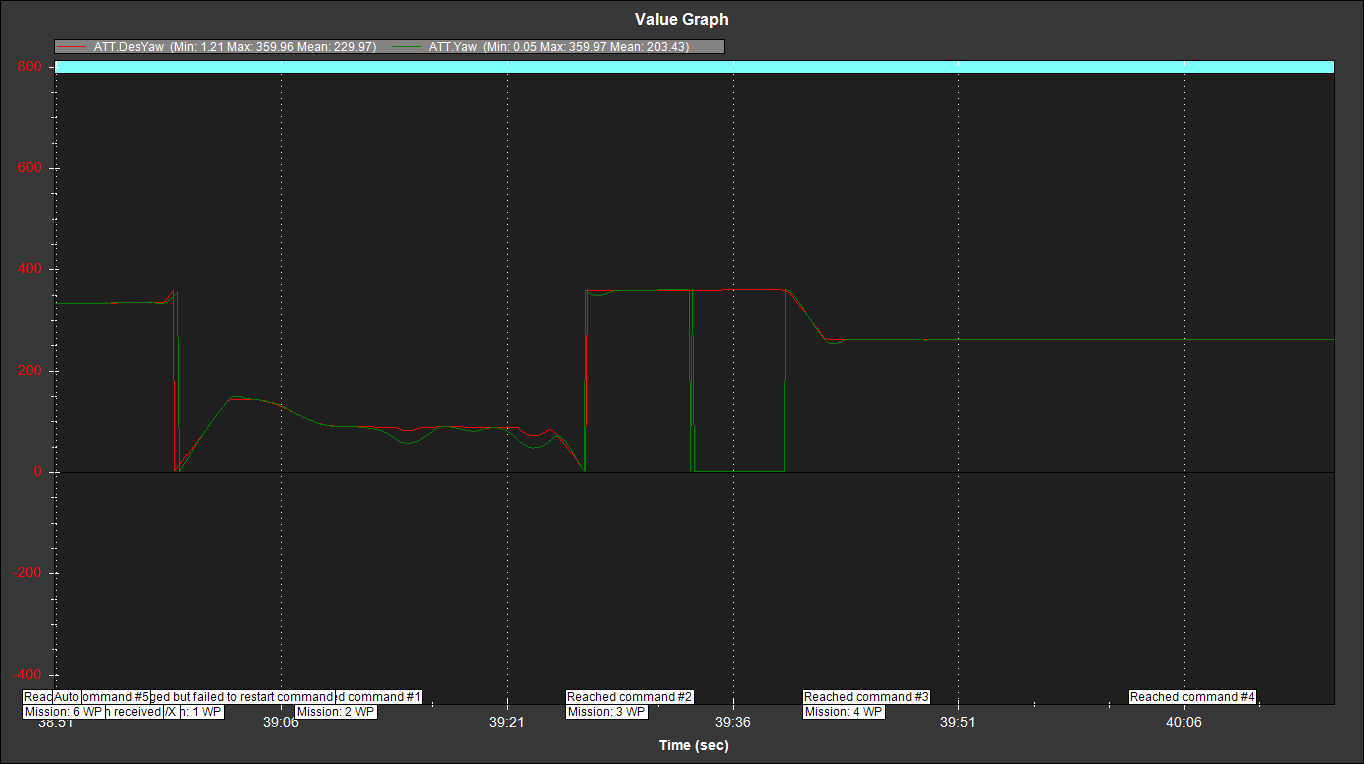
still my drone fly nice but the thing is in GPS aided mode like Loiter ,Auto etc we have been facing undesired (uncommanded) yaw rotation of the drone randomly.
we have checked there is no motor or frame twist to encourage this.
i don’t use the compass since we using GPS FOR YAW RTK system for heading.
What was the main difference with the 3rd flight compared to the first 2?
Was the payload different or something?
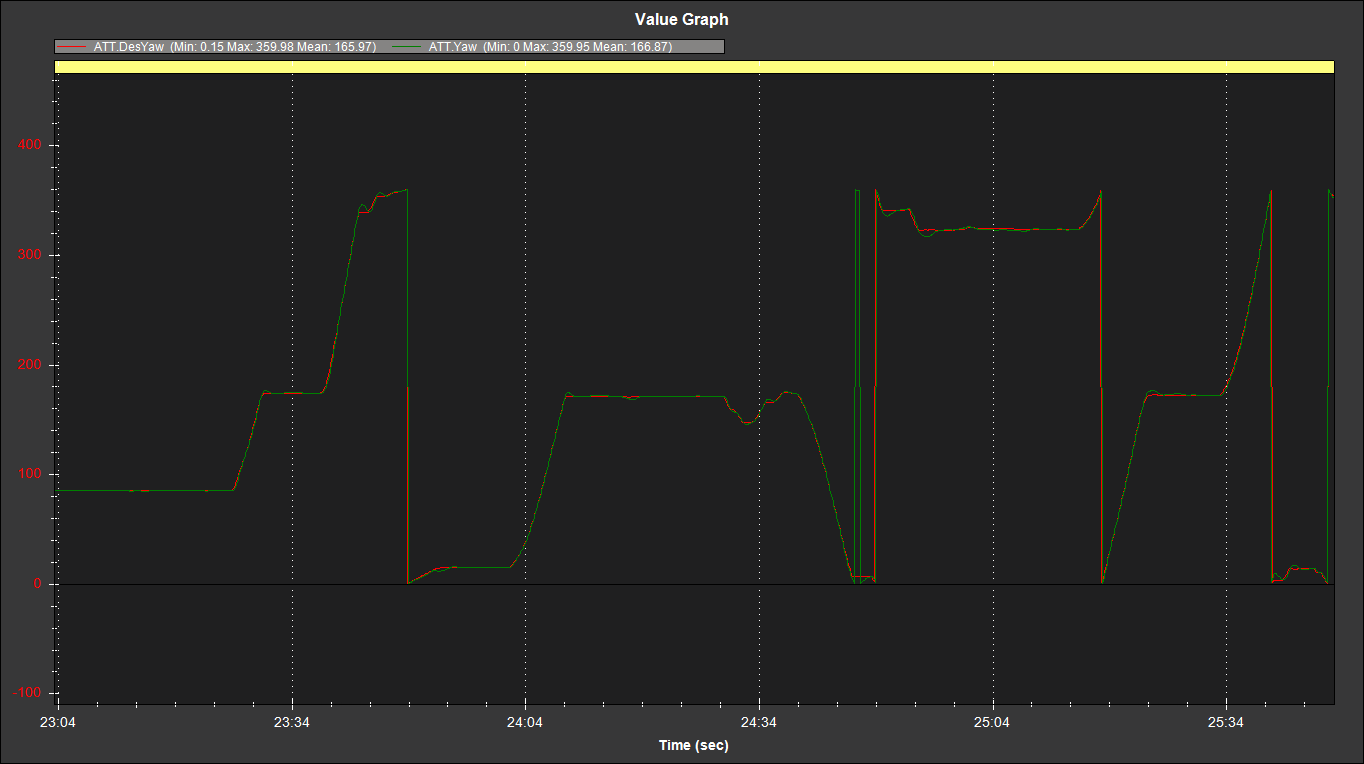
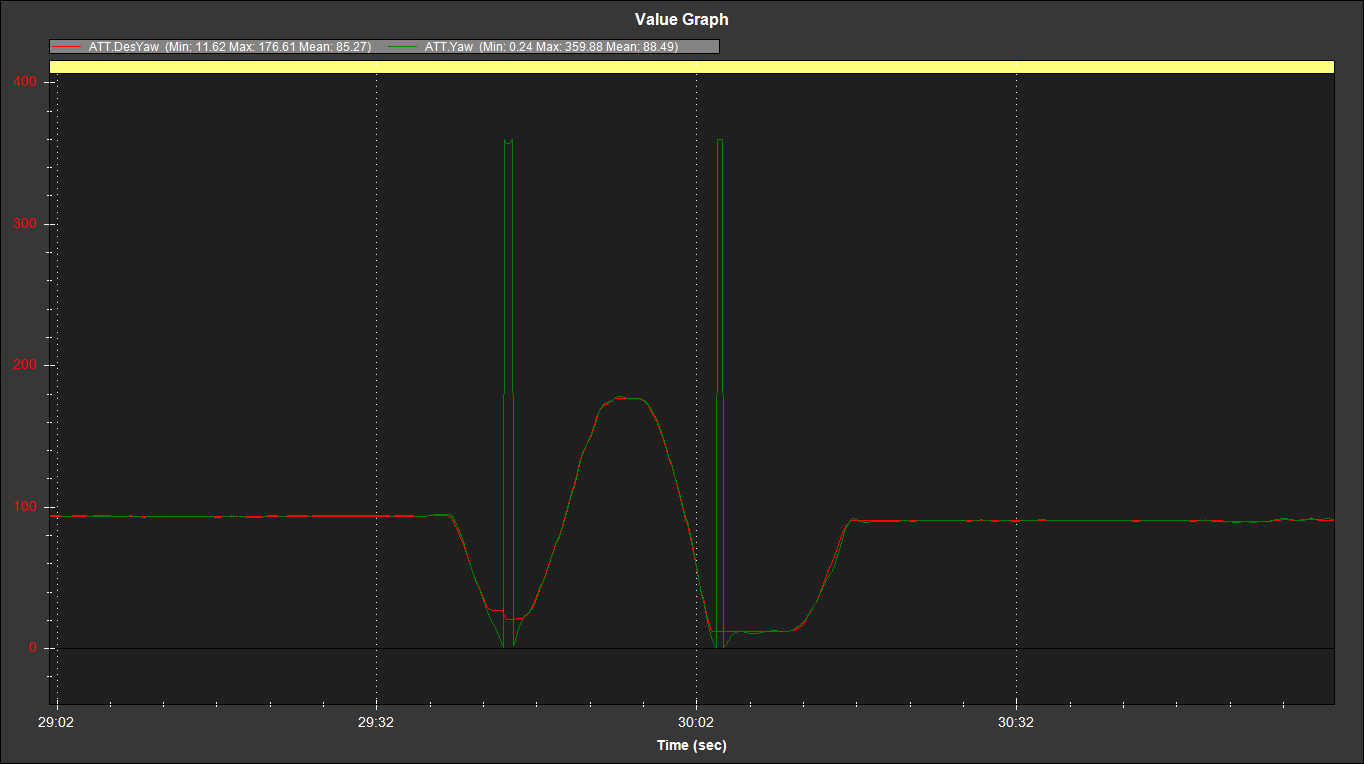
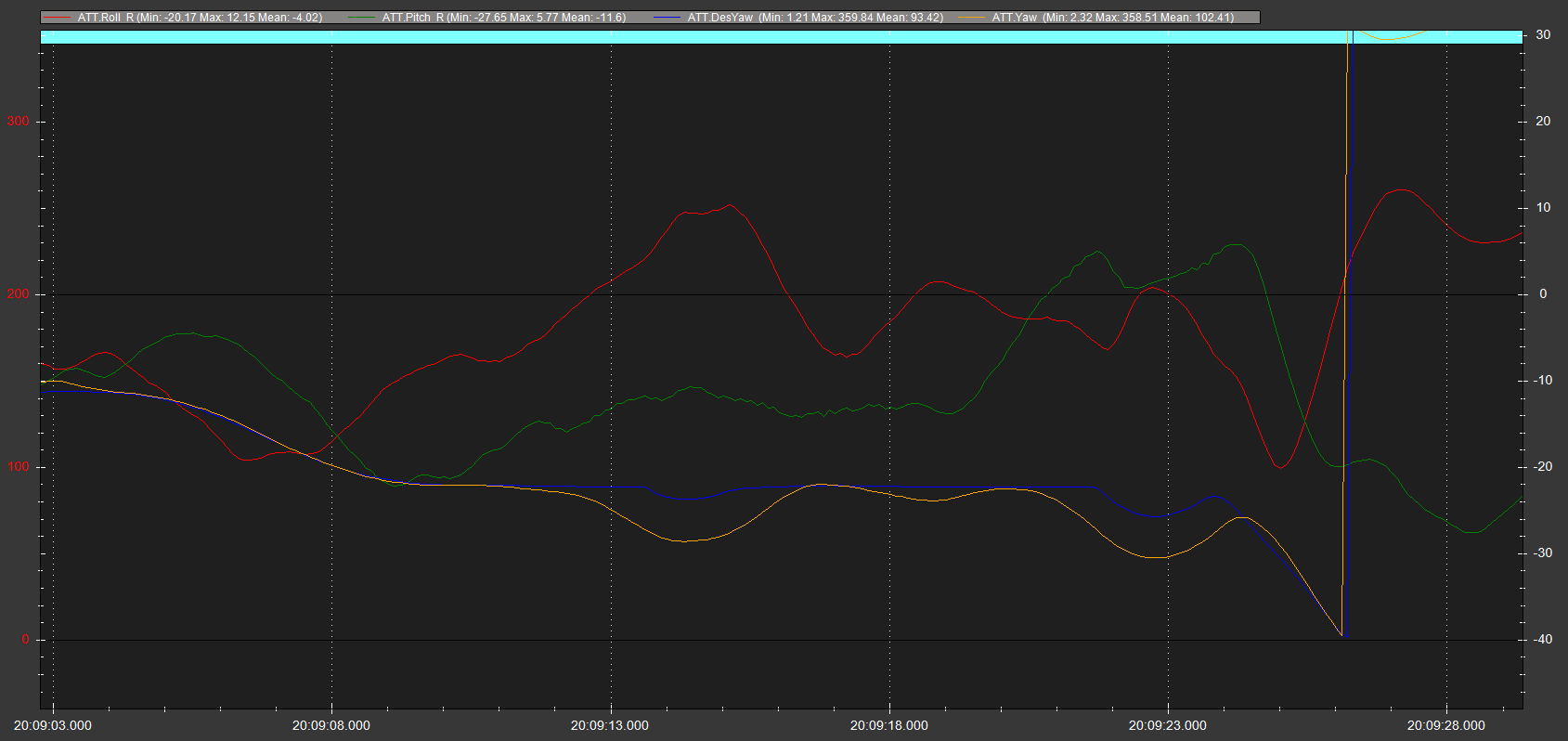
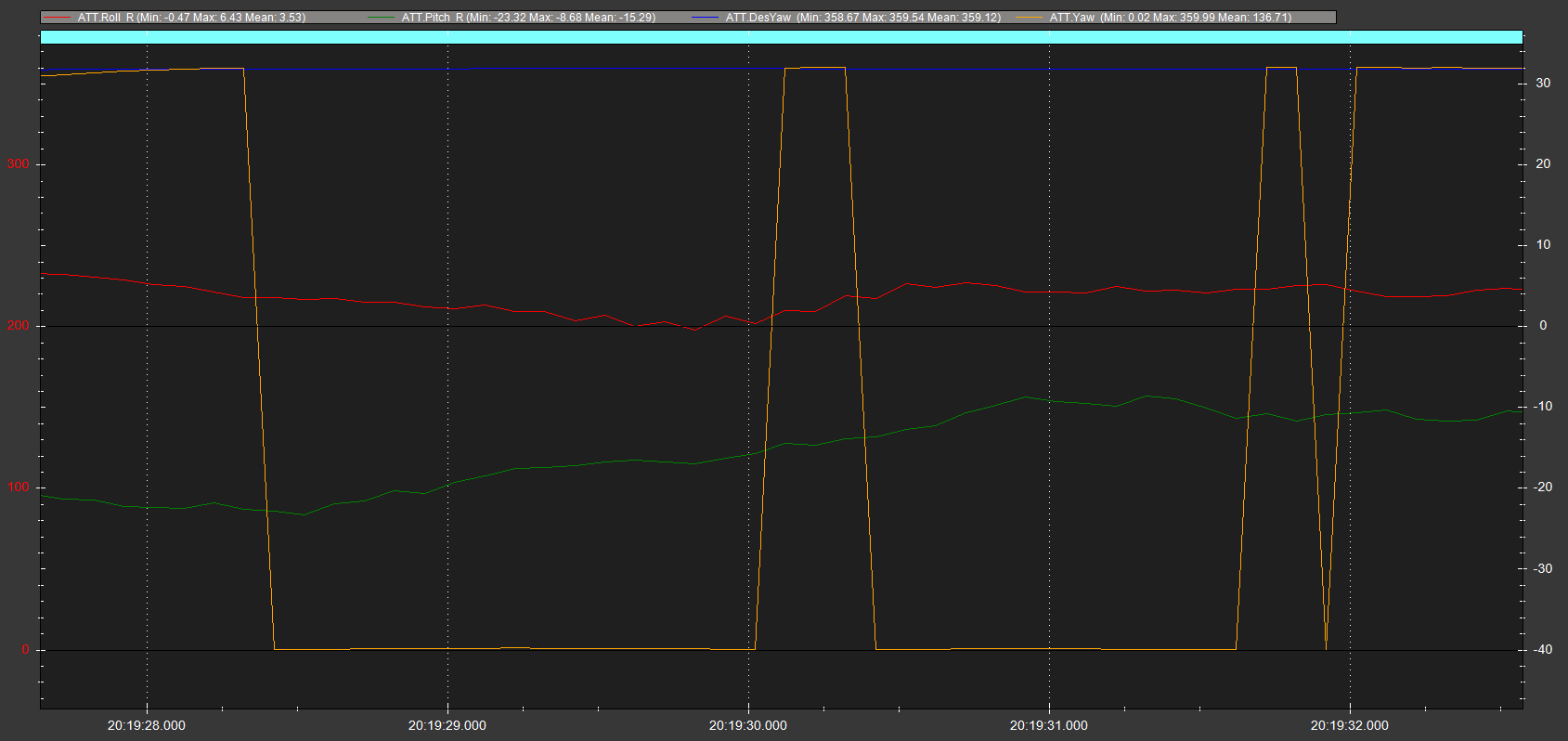
I dont see any big problem with yaw, there is a bit of overshoot and undershoot, most of which is associated with large pitch and roll movements at the same time, but nothing bad:
I would say you have more trouble with pitch and roll, they are quite nervous.
The motor outputs say there is a CW / CCW issue, like some motor mount twist.
During some manoeuvres some motor outputs go to minimum, almost always motor2 and motor6 due to the physical yaw bias (motor mount twist).
You will probably need to have some payload at all times to keep the motor outputs away from minimum.
There is quite a bit of oscillation in the motor outputs in some sections of flight, this seems to be coming from oscillation in the throttle output - or is at least obvious in the throttle.
It seems to be coming from the vertical position controller - altitude.
Is this really the absolute minimum reliable startup throttle for the motors? It seems a bit high. MOT_SPIN_ARM,0.13
If it can go lower, the MOT_SPIN_MIN could go correspondingly lower too.
I’m a little suspicious of MOT_THST_EXPO,0.65 - which motor/ESC sets are these?
3rd flight with no payload to check YAW rotation may induced by payload bay. our payload bay is big so that may cause the drag to the frame.
we have identified the motor twist on two arms so we will rectify the arm twist and will have flight test later.
Motor is running at MOT_SPIN_ARM = 0.1 itself but due to big motor and prop for reliable rotation on ARM/ Autotakeoff i kept MOT_SPIN_ARM = 0.13.
practically i don’t see any throttle oscillation on ascending at 2.5m/s and descending at 2m/s so i kept MOT_THST_EXPO = 0.65 which is default.
its Hobbywing H11M coaxial propulsion system with 48inch foldable carbon fibre propeller.
I think you should use the calculated MOT_THST_EXPO for those props. The default is for a small quad with about 9 or 10 inch props.
Try MOT_THST_EXPO,0.80 but you will have to retest MOT_SPIN_ARM and MOT_SPIN_MIN.
The calculated expo value is even higher than that, but 0.80 should be high enough.
Definitely set MOT_SPIN_ARM to as low as you can reliably get it, but it might be helpful and reassuring to increase the spool up time MOT_SPOOL_TIME,2