Im flying a V-tail fixed wing plane (based on Pixhawk Cube Orange 4.3.3, Mission Planner 1.3.75) and had a strange incident which im trying tpo investigate.
After a successful FBWA takeoff and flight, I’ve tried to go for an automatic flight in Guided mode.
At the moment of transuition to guided, the plane rolled a full roll to the right (360 degrees), stabilized a bit, and than I took it again in Manual - FBWA modes.
The plane Landed successfully and is safe and sound.
I want to ask if someone know about a bug or misbehaving of transitioning in arduplane to Guided mode, Or maybe its something else that you can think about?
Ill post here some pictures from the logs that can show the situation, please take a look and tell me what you think.
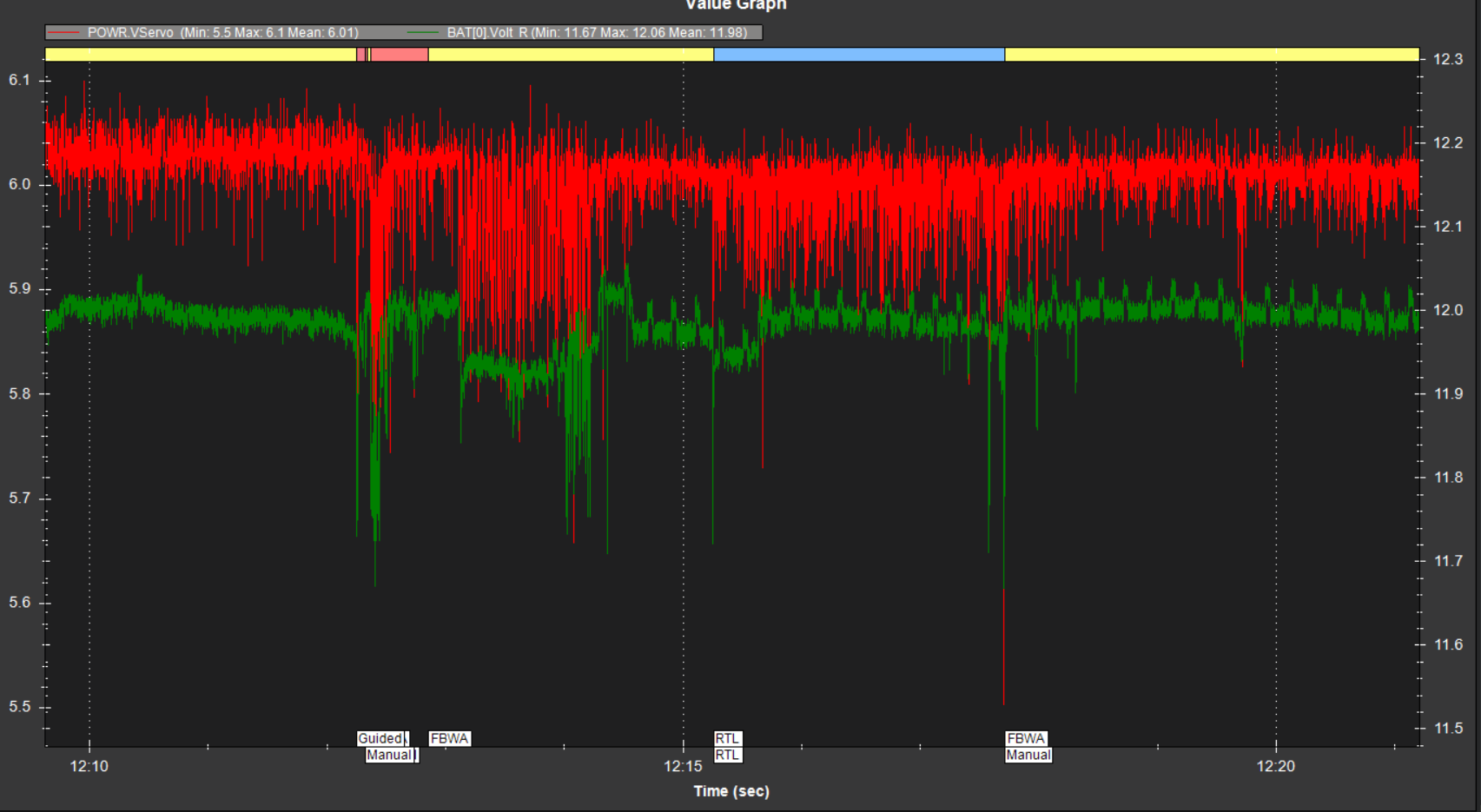
here is the avionic voltage (12V li-on battery) and servo rail voltage (via CC UBEC set to 6V) - we can see a voltage drop on the flight mode transition, but not something to cause major issues.
VCC voltage sees a small drop (from 5.15v to 5.10v) but im not sure if there was a short duration voltage drop which was may have not been logged in full.
i looked at this as i suspected some sort of HW reset in the flight controller
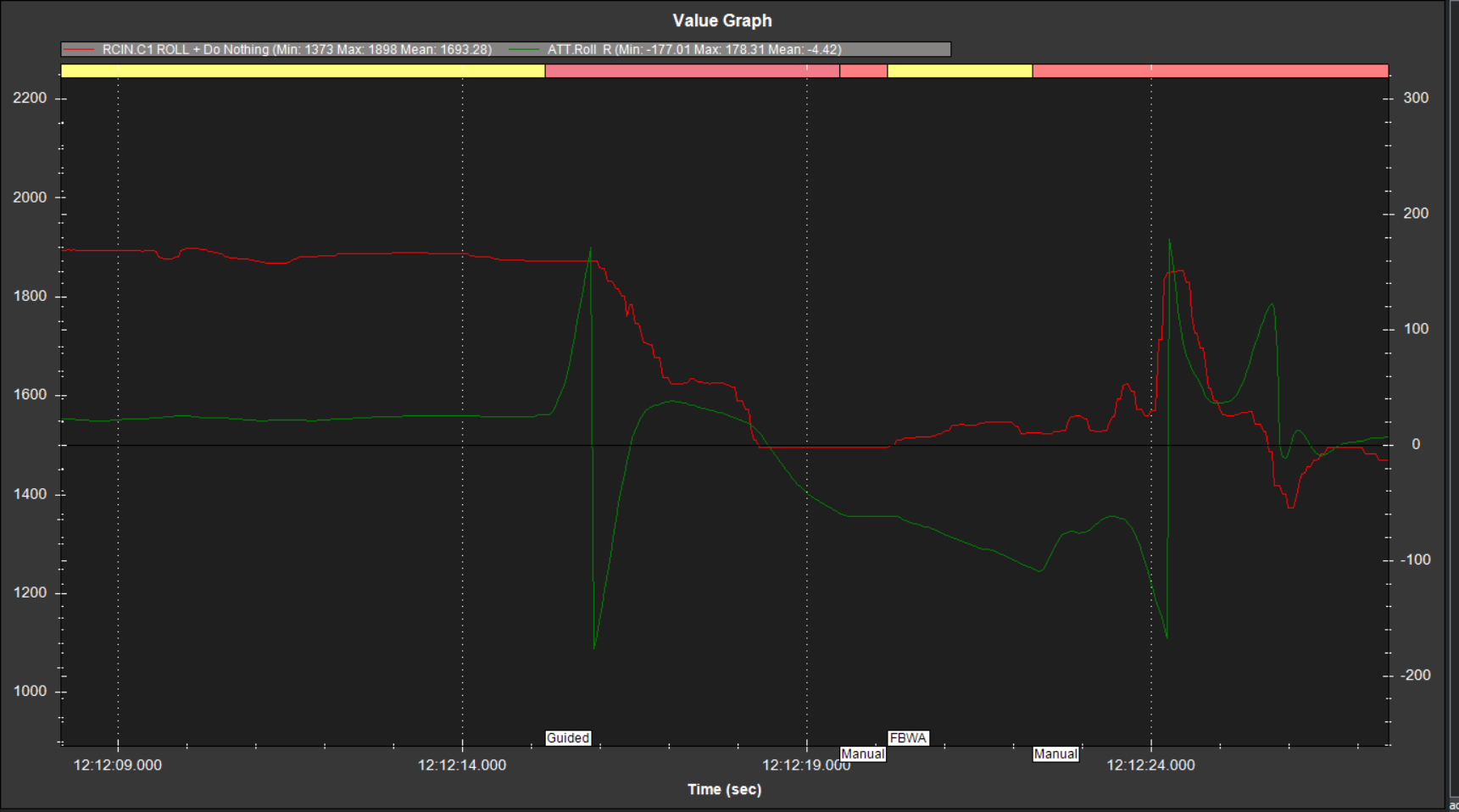
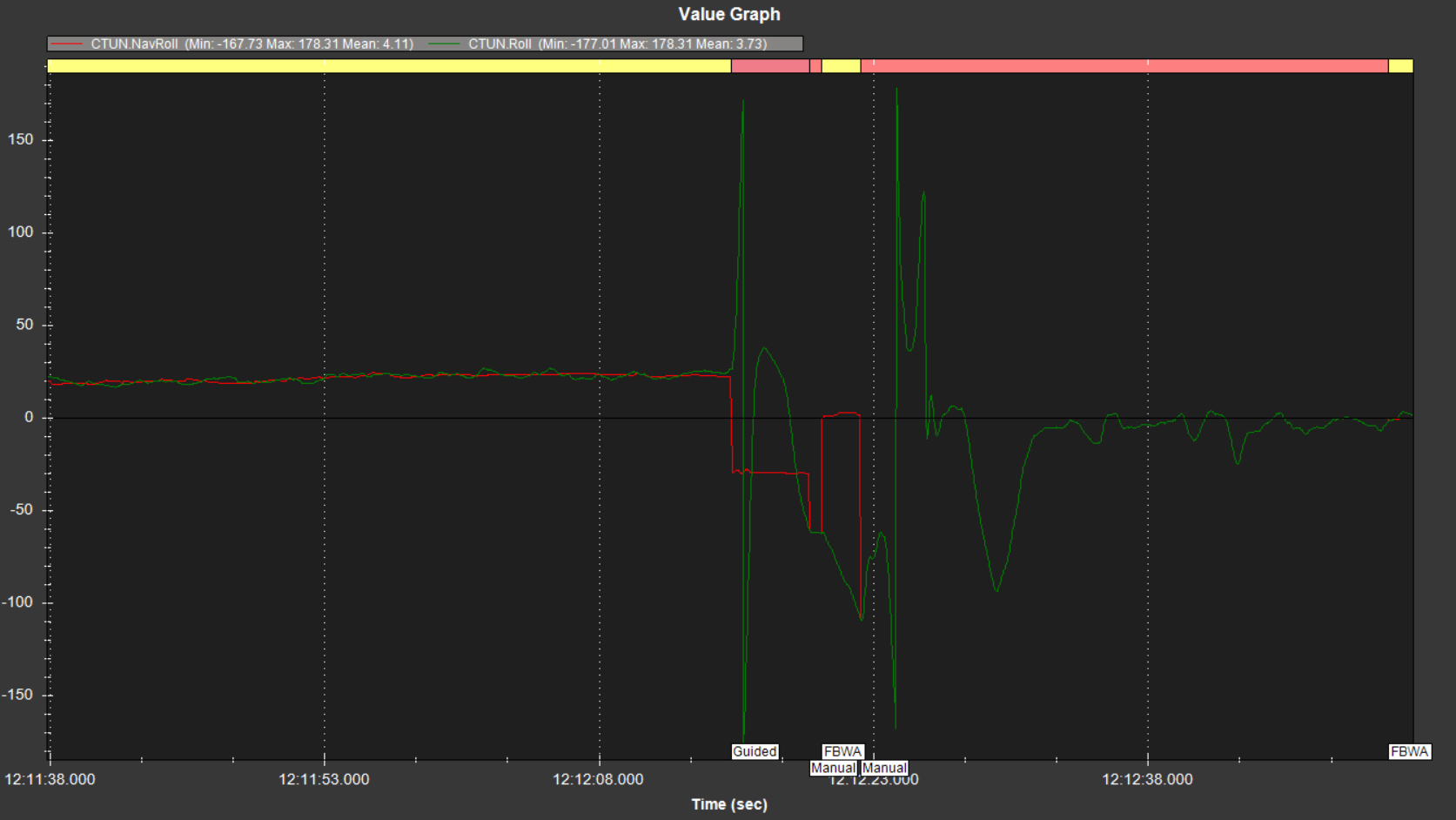
it clearly shows that at the moment of transition to GUIDED the pixhawk wanted to bank -30 degrees (LEFT roll) but for some reason commanded full RIGHT roll on the ailerons in the next graph.
RCout1 and RCout9 are the ailerons.
in this graph you can clearly see the flight controller commanded nearly full RIGHT roll deflection, despite trying to fly the aircraft LEFT.
Note:
roll deflection above ~1500 = RIGHT
roll deflection under ~1500 = LEFT