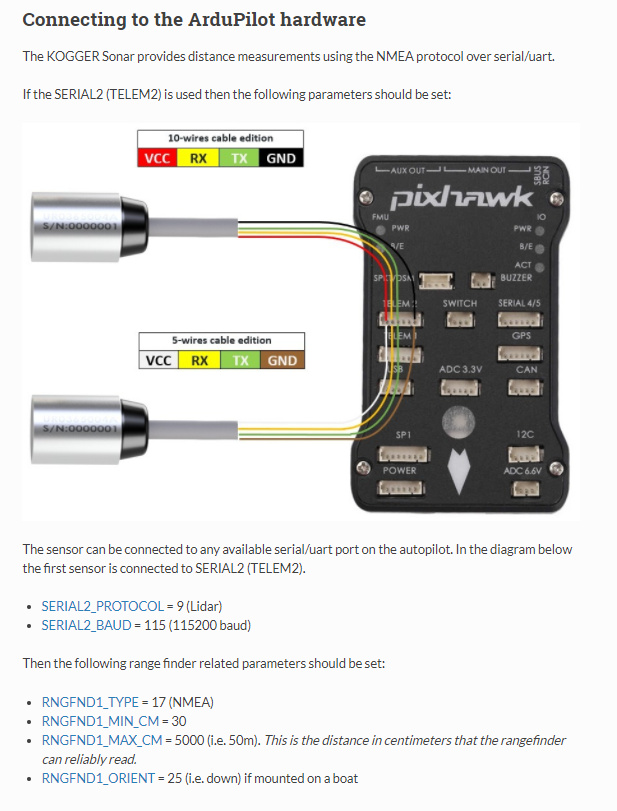
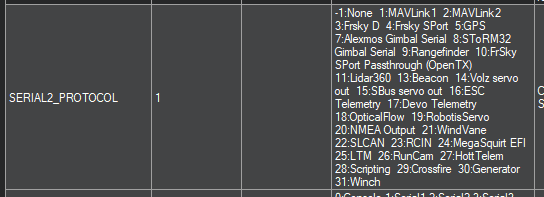
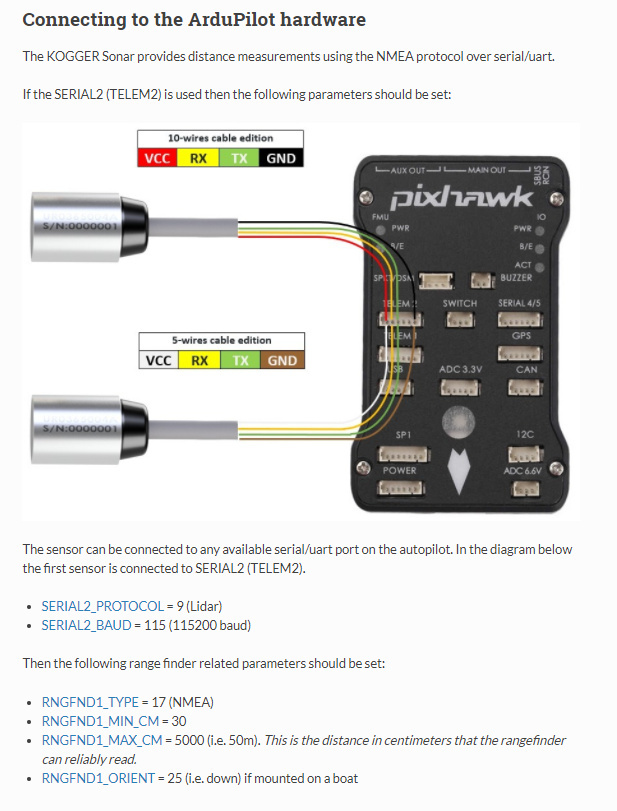
SERIAL2_PROTOCOL = 9 (lidar)
When… Ardurover 4.0 9 es RANGEFINDER.
What type I need to set ?
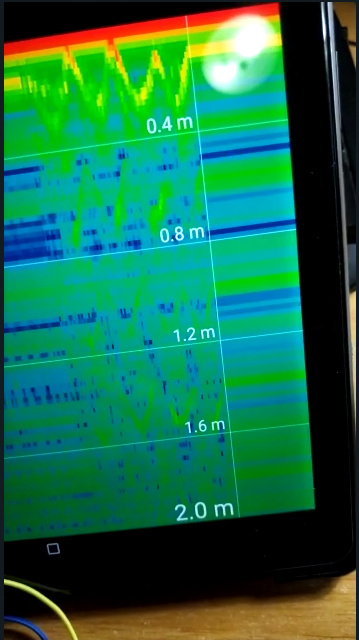
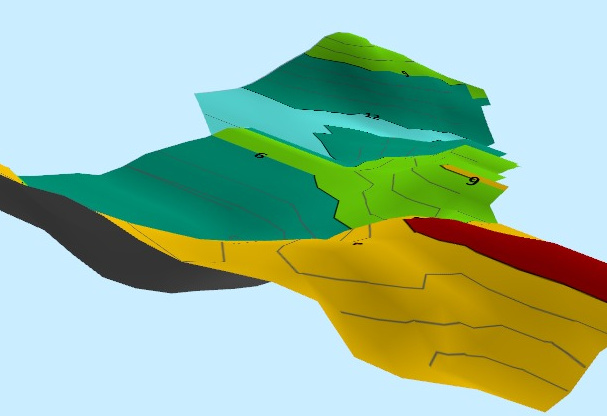
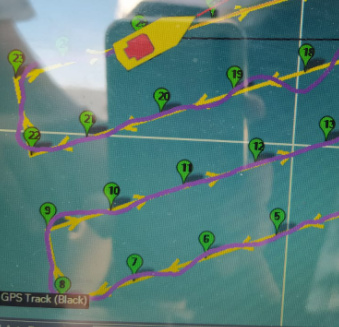
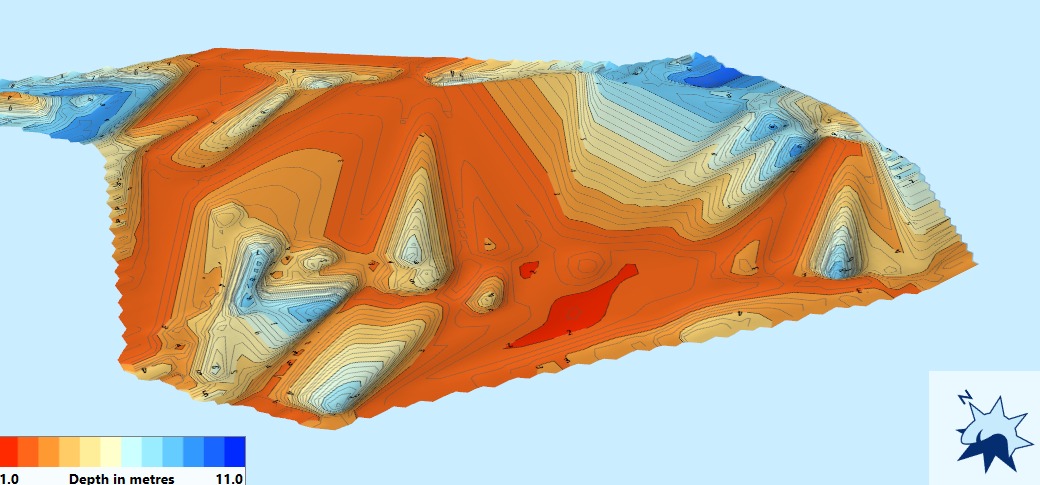
On my project, I want to graph the seaside from a small port.
I will be very grateful for all the help you can give me.
Best regards, revu.w3c@gmail.com
Well… now ArduPilot Rover 4.0 with MissionPlanner is working perfect. Motor, servo, GPS signal, its ok.
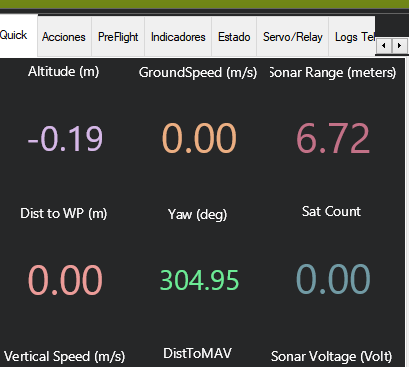
But now I have a problem with underwater sonar. Still marking 0.0 rangemeters…
serial2_protocol is perfectly setted… i dont know !
Hi
How did you solve the problem on pixhawk?
I met the same problem. I have finish configuration on kogger api and pixhawk. However, i got no data on pixhawk
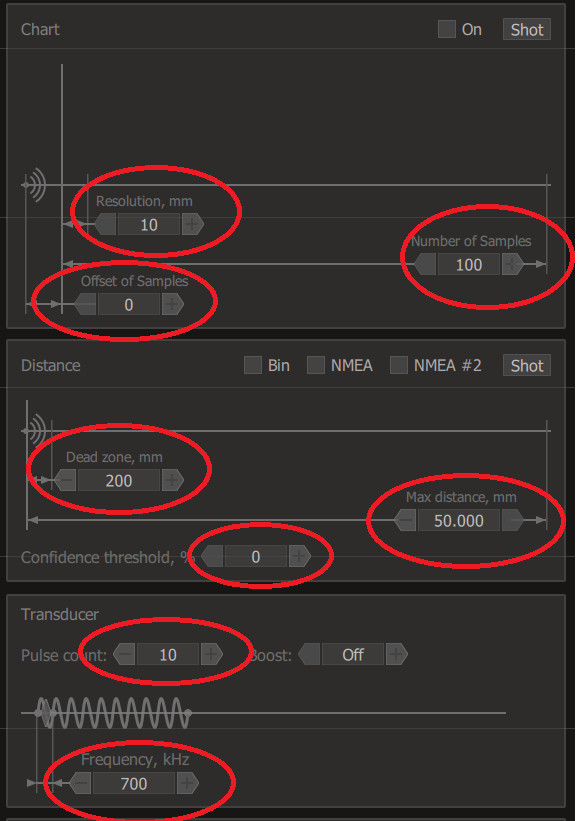
i cannot get any data from sonar range have you some suggestion ? from android app i can see something only from echogram but no range model used 2d-base , tried different settings /baud / ardu versions thanks